mirror of
https://github.com/qmk/qmk_firmware.git
synced 2025-08-10 20:25:56 +00:00
Compare commits
49 Commits
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
751316c344 | ||
|
|
5d3bf8a050 | ||
|
|
6501377070 | ||
|
|
af2ca13604 | ||
|
|
451c472d1d | ||
|
|
bfe76053ba | ||
|
|
9d41281a1d | ||
|
|
ba5e1f1bae | ||
|
|
e4823aadec | ||
|
|
5c9906eb4f | ||
|
|
f56d333db1 | ||
|
|
d8f76f9e6d | ||
|
|
6ca00c2152 | ||
|
|
dc6fe85b87 | ||
|
|
883dd2df80 | ||
|
|
2ac3a51d71 | ||
|
|
f66680d233 | ||
|
|
503cf18aed | ||
|
|
38d2c8cedf | ||
|
|
53224e03d6 | ||
|
|
7ef2ea3d49 | ||
|
|
9e4037465a | ||
|
|
fd4f102977 | ||
|
|
6d84795bc1 | ||
|
|
179e5c018f | ||
|
|
5246acb2e4 | ||
|
|
02a8c874f8 | ||
|
|
dae6f6b39b | ||
|
|
526c185e7e | ||
|
|
c63fd051da | ||
|
|
b95979560c | ||
|
|
65150984bd | ||
|
|
205321c377 | ||
|
|
1816ad01d0 | ||
|
|
9c8f61dfa0 | ||
|
|
d1df576ece | ||
|
|
83ebbf57b3 | ||
|
|
8e1f706ac6 | ||
|
|
b0c780ed32 | ||
|
|
3ad2be52a7 | ||
|
|
0fbcb41c85 | ||
|
|
ddca422776 | ||
|
|
82bb7d2852 | ||
|
|
1044519f36 | ||
|
|
209942366b | ||
|
|
494b34b63f | ||
|
|
58e3b01f37 | ||
|
|
6c2008c688 | ||
|
|
bcedc80ec7 |
4
Makefile
4
Makefile
@@ -294,8 +294,8 @@ define PARSE_RULE
|
||||
$$(info | QMK's make format recently changed to use folder locations and colons:)
|
||||
$$(info | make project_folder:keymap[:target])
|
||||
$$(info | Examples:)
|
||||
$$(info | make planck/rev4:default:dfu)
|
||||
$$(info | make planck:default)
|
||||
$$(info | make dz60:default)
|
||||
$$(info | make planck/rev6:default:flash)
|
||||
$$(info |)
|
||||
endif
|
||||
endef
|
||||
|
||||
2
Vagrantfile
vendored
2
Vagrantfile
vendored
@@ -89,7 +89,7 @@ Vagrant.configure(2) do |config|
|
||||
|
||||
Examples:
|
||||
make planck/rev4:default:dfu
|
||||
make planck:default
|
||||
make planck/rev4:default
|
||||
|
||||
EOT
|
||||
end
|
||||
|
||||
@@ -34,7 +34,9 @@
|
||||
* [Customizing Functionality](custom_quantum_functions.md)
|
||||
* [Driver Installation with Zadig](driver_installation_zadig.md)
|
||||
* [Keymap Overview](keymap.md)
|
||||
* [Vagrant Guide](getting_started_vagrant.md)
|
||||
* Development Environments
|
||||
* [Docker Guide](getting_started_docker.md)
|
||||
* [Vagrant Guide](getting_started_vagrant.md)
|
||||
* Flashing
|
||||
* [Flashing](flashing.md)
|
||||
* [Flashing ATmega32A (ps2avrgb)](flashing_bootloadhid.md)
|
||||
@@ -126,6 +128,7 @@
|
||||
* [SPI Driver](spi_driver.md)
|
||||
* [WS2812 Driver](ws2812_driver.md)
|
||||
* [EEPROM Driver](eeprom_driver.md)
|
||||
* ['serial' Driver](serial_driver.md)
|
||||
* [GPIO Controls](internals_gpio_control.md)
|
||||
* [Keyboard Guidelines](hardware_keyboard_guidelines.md)
|
||||
|
||||
|
||||
@@ -102,7 +102,7 @@ This happens immediately after the previous `future` branch is merged.
|
||||
* [ ] Roll up the ChangeLog into one file.
|
||||
* [ ] `git commit -m 'Merge point for <DATE> Breaking Change'`
|
||||
* [ ] `git push origin future`
|
||||
* Github Actions
|
||||
* GitHub Actions
|
||||
* [ ] Create a PR for `future`
|
||||
* [ ] Make sure travis comes back clean
|
||||
* [ ] Merge `future` PR
|
||||
|
||||
@@ -6,6 +6,8 @@
|
||||
|
||||
This command allows you to compile firmware from any directory. You can compile JSON exports from <https://config.qmk.fm>, compile keymaps in the repo, or compile the keyboard in the current working directory.
|
||||
|
||||
This command is directory aware. It will automatically fill in KEYBOARD and/or KEYMAP if you are in a keyboard or keymap directory.
|
||||
|
||||
**Usage for Configurator Exports**:
|
||||
|
||||
```
|
||||
@@ -73,8 +75,9 @@ $ qmk compile -kb dz60
|
||||
|
||||
## `qmk flash`
|
||||
|
||||
This command is similar to `qmk compile`, but can also target a bootloader. The bootloader is optional, and is set to `:flash` by default.
|
||||
To specify a different bootloader, use `-bl <bootloader>`. Visit the [Flashing Firmware](flashing.md) guide for more details of the available bootloaders.
|
||||
This command is similar to `qmk compile`, but can also target a bootloader. The bootloader is optional, and is set to `:flash` by default. To specify a different bootloader, use `-bl <bootloader>`. Visit the [Flashing Firmware](flashing.md) guide for more details of the available bootloaders.
|
||||
|
||||
This command is directory aware. It will automatically fill in KEYBOARD and/or KEYMAP if you are in a keyboard or keymap directory.
|
||||
|
||||
**Usage for Configurator Exports**:
|
||||
|
||||
@@ -128,6 +131,32 @@ Check your environment and report problems only:
|
||||
|
||||
qmk doctor -n
|
||||
|
||||
## `qmk info`
|
||||
|
||||
Displays information about keyboards and keymaps in QMK. You can use this to get information about a keyboard, show the layouts, display the underlying key matrix, or to pretty-print JSON keymaps.
|
||||
|
||||
**Usage**:
|
||||
|
||||
```
|
||||
qmk info [-f FORMAT] [-m] [-l] [-km KEYMAP] [-kb KEYBOARD]
|
||||
```
|
||||
|
||||
This command is directory aware. It will automatically fill in KEYBOARD and/or KEYMAP if you are in a keyboard or keymap directory.
|
||||
|
||||
**Examples**:
|
||||
|
||||
Show basic information for a keyboard:
|
||||
|
||||
qmk info -kb planck/rev5
|
||||
|
||||
Show the matrix for a keyboard:
|
||||
|
||||
qmk info -kb ergodox_ez -m
|
||||
|
||||
Show a JSON keymap for a keyboard:
|
||||
|
||||
qmk info -kb clueboard/california -km default
|
||||
|
||||
## `qmk json2c`
|
||||
|
||||
Creates a keymap.c from a QMK Configurator export.
|
||||
@@ -152,6 +181,8 @@ qmk list-keyboards
|
||||
|
||||
This command lists all the keymaps for a specified keyboard (and revision).
|
||||
|
||||
This command is directory aware. It will automatically fill in KEYBOARD if you are in a keyboard directory.
|
||||
|
||||
**Usage**:
|
||||
|
||||
```
|
||||
@@ -162,6 +193,8 @@ qmk list-keymaps -kb planck/ez
|
||||
|
||||
This command creates a new keymap based on a keyboard's existing default keymap.
|
||||
|
||||
This command is directory aware. It will automatically fill in KEYBOARD and/or KEYMAP if you are in a keyboard or keymap directory.
|
||||
|
||||
**Usage**:
|
||||
|
||||
```
|
||||
|
||||
@@ -108,7 +108,7 @@ compile.keymap: skully -> None
|
||||
|-----|---------------|-------------|
|
||||
| user.keyboard | None | The keyboard path (Example: `clueboard/66/rev4`) |
|
||||
| user.keymap | None | The keymap name (Example: `default`) |
|
||||
| user.name | None | The user's github username. |
|
||||
| user.name | None | The user's GitHub username. |
|
||||
|
||||
# All Configuration Options
|
||||
|
||||
|
||||
@@ -210,7 +210,7 @@ Our tests can be found in `lib/python/qmk/tests/`. You will find both unit and i
|
||||
|
||||
If your PR does not include a comprehensive set of tests please add comments like this to your code so that other people know where they can help:
|
||||
|
||||
# TODO(unassigned/<yourGithubUsername>): Write <unit|integration> tests
|
||||
# TODO(unassigned/<your_github_username>): Write <unit|integration> tests
|
||||
|
||||
We use [nose2](https://nose2.readthedocs.io/en/latest/getting_started.html) to run our tests. You can refer to the nose2 documentation for more details on what you can do in your test functions.
|
||||
|
||||
|
||||
@@ -12,7 +12,7 @@ I'll say that again because it's important:
|
||||
|
||||
!> **MAKE SURE YOU SELECT THE RIGHT VERSION!**
|
||||
|
||||
If your keyboard has been advertised to be powered by QMK but is not in the list, chances are a developer hasn't gotten to it yet or we haven't had a chance to merge it in yet. File an issue at [qmk_firmware](https://github.com/qmk/qmk_firmware/issues) requesting to support that particular keyboard, if there is no active [Pull Request](https://github.com/qmk/qmk_firmware/pulls?q=is%3Aopen+is%3Apr+label%3Akeyboard) for it. There are also QMK powered keyboards that are in their manufacturer's own github accounts. Double check for that as well. <!-- FIXME(skullydazed): This feels too wordy and I'm not sure we want to encourage these kinds of issues. Also, should we prompt them to bug the manufacutrer? -->
|
||||
If your keyboard has been advertised to be powered by QMK but is not in the list, chances are a developer hasn't gotten to it yet or we haven't had a chance to merge it in yet. File an issue at [qmk_firmware](https://github.com/qmk/qmk_firmware/issues) requesting to support that particular keyboard, if there is no active [Pull Request](https://github.com/qmk/qmk_firmware/pulls?q=is%3Aopen+is%3Apr+label%3Akeyboard) for it. There are also QMK powered keyboards that are in their manufacturer's own GitHub accounts. Double check for that as well. <!-- FIXME(skullydazed): This feels too wordy and I'm not sure we want to encourage these kinds of issues. Also, should we prompt them to bug the manufacutrer? -->
|
||||
|
||||
## Step 2: Select Your Keyboard Layout
|
||||
|
||||
|
||||
@@ -13,7 +13,7 @@ QMK (*Quantum Mechanical Keyboard*) ist eine Open-Source-Community, welche die Q
|
||||
|
||||
## Bezugsquelle für QMK
|
||||
|
||||
Wenn Du vorhast, deine Tastatur, Tastaturbelegung oder Features zu QMK beizusteuern, geht das am einfachsten, indem Du das [Repository auf Github](https://github.com/qmk/qmk_firmware#fork-destination-box) forkst, die Änderungen in deinem lokalen Repo vornimmst und anschließend einen [Pull Request](https://github.com/qmk/qmk_firmware/pulls) einreichst.
|
||||
Wenn Du vorhast, deine Tastatur, Tastaturbelegung oder Features zu QMK beizusteuern, geht das am einfachsten, indem Du das [Repository auf GitHub](https://github.com/qmk/qmk_firmware#fork-destination-box) forkst, die Änderungen in deinem lokalen Repo vornimmst und anschließend einen [Pull Request](https://github.com/qmk/qmk_firmware/pulls) einreichst.
|
||||
|
||||
Ansonsten kannst Du es als [zip](https://github.com/qmk/qmk_firmware/zipball/master) oder [tar](https://github.com/qmk/qmk_firmware/tarball/master) herunterladen, oder es direkt via git klonen (`git clone git@github.com:qmk/qmk_firmware.git` bzw. `git clone https://github.com/qmk/qmk_firmware.git`).
|
||||
|
||||
|
||||
@@ -11,7 +11,7 @@
|
||||
* [QMK CLI](de/cli.md)
|
||||
* [QMK CLI Konfiguration](de/cli_configuration.md)
|
||||
* [Zu QMK beitragen](de/contributing.md)
|
||||
* [Anleitung für Github](de/getting_started_github.md)
|
||||
* [Anleitung für GitHub](de/getting_started_github.md)
|
||||
* [Nach Hilfe fragen](de/getting_started_getting_help.md)
|
||||
|
||||
* [Breaking Changes](de/breaking_changes.md)
|
||||
|
||||
@@ -6,7 +6,7 @@ Git Ressourcen:
|
||||
|
||||
* [Gutes allgemeines Tutorial](https://www.codecademy.com/learn/learn-git) (auf Englisch)
|
||||
* [Git spielerisch anhand von Beispielen lernen](https://learngitbranching.js.org/) (auf Englisch)
|
||||
* [Mehr über den allgemeinen Umgang mit Github](getting_started_github.md)
|
||||
* [Mehr über den allgemeinen Umgang mit GitHub](getting_started_github.md)
|
||||
* [Mehr über Git im Bezug zu QMK](contributing.md)
|
||||
|
||||
Mehr über die Arbeit mit der Befehlszeile:
|
||||
|
||||
@@ -13,7 +13,7 @@ QMK (*Quantum Mechanical Keyboard*) es una comunidad open source que mantiene el
|
||||
|
||||
## Cómo conseguirlo
|
||||
|
||||
Si estás pensando en contribuir con un keymap, teclado, or característica a QMK, la manera más sencilla es hacer un [fork del repositorio en Github](https://github.com/qmk/qmk_firmware#fork-destination-box), y clonar tu repositorio localmente para hacer los cambios, subirlos, y abir un [Pull Request](https://github.com/qmk/qmk_firmware/pulls) desde tu fork.
|
||||
Si estás pensando en contribuir con un keymap, teclado, or característica a QMK, la manera más sencilla es hacer un [fork del repositorio en GitHub](https://github.com/qmk/qmk_firmware#fork-destination-box), y clonar tu repositorio localmente para hacer los cambios, subirlos, y abir un [Pull Request](https://github.com/qmk/qmk_firmware/pulls) desde tu fork.
|
||||
|
||||
De cualquier manera, también puedes descargarlo directamente en formatos ([zip](https://github.com/qmk/qmk_firmware/zipball/master), [tar](https://github.com/qmk/qmk_firmware/tarball/master)), o clonarlo via git (`git@github.com:qmk/qmk_firmware.git`), o https (`https://github.com/qmk/qmk_firmware.git`).
|
||||
|
||||
|
||||
@@ -11,7 +11,7 @@
|
||||
* [QMK CLI](es/cli.md)
|
||||
* [Configuración de QMK CLI](es/cli_configuration.md)
|
||||
* [Contribuyendo a QMK](es/contributing.md)
|
||||
* [Cómo usar Github](es/getting_started_github.md)
|
||||
* [Cómo usar GitHub](es/getting_started_github.md)
|
||||
* [Obtener ayuda](es/getting_started_getting_help.md)
|
||||
|
||||
* [Cambios incompatibles](es/breaking_changes.md)
|
||||
|
||||
@@ -6,7 +6,7 @@ Este documento procura instruir a los novatos en las mejores prácticas para ten
|
||||
|
||||
En este documento suponemos un par de cosas:
|
||||
|
||||
1. Tienes una cuenta de Github, y has hecho un [fork del repo qmk_firmware](getting_started_github.md) en tu cuenta.
|
||||
1. Tienes una cuenta de GitHub, y has hecho un [fork del repo qmk_firmware](getting_started_github.md) en tu cuenta.
|
||||
2. Has [configurado tu entorno de desarrollo](newbs_getting_started.md?id=environment-setup).
|
||||
|
||||
|
||||
|
||||
@@ -21,7 +21,7 @@ Lo diré otra vez porque es importante
|
||||
|
||||
!> **ASEGÚRATE DE QUE SELECCIONAS LA VERSIÓN CORRECTA!**
|
||||
|
||||
Si se ha anunciado que tu teclado funciona con QMK pero no está en la lista, es probable que un desarrollador no se haya encargado de él aún o que todavía no hemos tenido la oportunidad de incluirlo. Abre un issue en [qmk_firmware](https://github.com/qmk/qmk_firmware/issues) solicitando soportar ese teclado un particular, si no hay un [Pull Request](https://github.com/qmk/qmk_firmware/pulls?q=is%3Aopen+is%3Apr+label%3Akeyboard) activo para ello. Hay también teclados que funcionan con QMK que están en las cuentas de github de sus manufacturantes. Acuérdate de comprobar esto también.
|
||||
Si se ha anunciado que tu teclado funciona con QMK pero no está en la lista, es probable que un desarrollador no se haya encargado de él aún o que todavía no hemos tenido la oportunidad de incluirlo. Abre un issue en [qmk_firmware](https://github.com/qmk/qmk_firmware/issues) solicitando soportar ese teclado un particular, si no hay un [Pull Request](https://github.com/qmk/qmk_firmware/pulls?q=is%3Aopen+is%3Apr+label%3Akeyboard) activo para ello. Hay también teclados que funcionan con QMK que están en las cuentas de GitHub de sus manufacturantes. Acuérdate de comprobar esto también.
|
||||
|
||||
## Eligiendo el layout de tu teclado
|
||||
|
||||
|
||||
@@ -6,7 +6,7 @@ Recursos de Git:
|
||||
|
||||
* [Excelente tutorial general](https://www.codecademy.com/learn/learn-git)
|
||||
* [Juego de Git para aprender usando ejemplos](https://learngitbranching.js.org/)
|
||||
* [Recursos de Git para aprender más sobre Github](getting_started_github.md)
|
||||
* [Recursos de Git para aprender más sobre GitHub](getting_started_github.md)
|
||||
* [Recursos de Git dirigidos específicamente a QMK](contributing.md)
|
||||
|
||||
|
||||
|
||||
@@ -27,20 +27,17 @@ In the following example, a custom key is used to click the mouse and scroll 127
|
||||
|
||||
```c
|
||||
case MS_SPECIAL:
|
||||
report_mouse_t currentReport = pointing_device_get_report();
|
||||
if (record->event.pressed)
|
||||
{
|
||||
report_mouse_t currentReport = pointing_device_get_report();
|
||||
if (record->event.pressed) {
|
||||
currentReport.v = 127;
|
||||
currentReport.h = 127;
|
||||
currentReport.buttons |= MOUSE_BTN1; //this is defined in report.h
|
||||
}
|
||||
else
|
||||
{
|
||||
currentReport.h = 127;
|
||||
currentReport.buttons |= MOUSE_BTN1; // this is defined in report.h
|
||||
} else {
|
||||
currentReport.v = -127;
|
||||
currentReport.h = -127;
|
||||
currentReport.buttons &= ~MOUSE_BTN1;
|
||||
}
|
||||
pointing_device_set_report(currentReport);
|
||||
pointing_device_set_report(currentReport);
|
||||
break;
|
||||
```
|
||||
|
||||
|
||||
@@ -44,7 +44,11 @@ To connect your host computer to your keyboard with raw HID you need four pieces
|
||||
3. Usage Page
|
||||
4. Usage
|
||||
|
||||
The first two can easily be found in your keyboard's `config.h` in the keyboard's main directory under `VENDOR_ID` and `PRODUCT_ID`. **Usage Page** is **`0xFF60`** and **Usage** is **`0x0061`**.
|
||||
The first two can easily be found in your keyboard's `config.h` in the keyboard's main directory under `VENDOR_ID` and `PRODUCT_ID`.
|
||||
|
||||
The final two can be overridden in your keyboard's `config.h` in the keyboard's main directory by redefining the values: `#define RAW_USAGE_PAGE 0xFF60` and `#define RAW_USAGE_ID 0x61`.
|
||||
|
||||
By default, **Usage Page** is `0xFF60` and **Usage** is `0x61`.
|
||||
|
||||
### Building your host
|
||||
|
||||
|
||||
@@ -8,9 +8,20 @@ QMK Firmware has a generic implementation that is usable by any board, as well a
|
||||
|
||||
For this, we will mostly be talking about the generic implementation used by the Let's Split and other keyboards.
|
||||
|
||||
!> ARM is not yet supported for Split Keyboards. Progress is being made, but we are not quite there, yet.
|
||||
!> ARM is not yet fully supported for Split Keyboards and has many limitations. Progress is being made, but we have not yet reached 100% feature parity.
|
||||
|
||||
|
||||
## Compatibility Overview
|
||||
|
||||
| Transport | AVR | ARM |
|
||||
|------------------------------|--------------------|--------------------|
|
||||
| ['serial'](serial_driver.md) | :heavy_check_mark: | :white_check_mark: <sup>1</sup> |
|
||||
| I2C | :heavy_check_mark: | |
|
||||
|
||||
Notes:
|
||||
|
||||
1. Both hardware and software limitations are detailed within the [driver documentation](serial_driver.md).
|
||||
|
||||
## Hardware Configuration
|
||||
|
||||
This assumes that you're using two Pro Micro-compatible controllers, and are using TRRS jacks to connect to two halves.
|
||||
|
||||
@@ -1,6 +1,6 @@
|
||||
# Userspace: Sharing Code Between Keymaps
|
||||
|
||||
If you use more than one keyboard with a similar keymap, you might see the benefit in being able to share code between them. Create your own folder in `users/` named the same as your keymap (ideally your github username, `<name>`) with the following structure:
|
||||
If you use more than one keyboard with a similar keymap, you might see the benefit in being able to share code between them. Create your own folder in `users/` named the same as your keymap (ideally your GitHub username, `<name>`) with the following structure:
|
||||
|
||||
* `/users/<name>/` (added to the path automatically)
|
||||
* `readme.md` (optional, recommended)
|
||||
@@ -73,7 +73,7 @@ The reason for this, is that `<name>.h` won't be added in time to add settings (
|
||||
|
||||
## Readme (`readme.md`)
|
||||
|
||||
Please include authorship (your name, github username, email), and optionally [a license that's GPL compatible](https://www.gnu.org/licenses/license-list.html#GPLCompatibleLicenses).
|
||||
Please include authorship (your name, GitHub username, email), and optionally [a license that's GPL compatible](https://www.gnu.org/licenses/license-list.html#GPLCompatibleLicenses).
|
||||
|
||||
You can use this as a template:
|
||||
```
|
||||
@@ -93,7 +93,7 @@ You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
```
|
||||
|
||||
You'd want to replace the year, name, email and github username with your info.
|
||||
You'd want to replace the year, name, email and GitHub username with your info.
|
||||
|
||||
Additionally, this is a good place to document your code, if you wish to share it with others.
|
||||
|
||||
|
||||
@@ -4,8 +4,8 @@
|
||||
[](https://travis-ci.org/qmk/qmk_firmware)
|
||||
[](https://discord.gg/Uq7gcHh)
|
||||
[](https://docs.qmk.fm)
|
||||
[](https://github.com/qmk/qmk_firmware/pulse/monthly)
|
||||
[](https://github.com/qmk/qmk_firmware/)
|
||||
[](https://github.com/qmk/qmk_firmware/pulse/monthly)
|
||||
[](https://github.com/qmk/qmk_firmware/)
|
||||
|
||||
## Qu'est-ce que QMK Firmware ?
|
||||
|
||||
@@ -13,7 +13,7 @@ QMK (*Quantum Mechanical Keyboard*) est une communauté open source qui maintien
|
||||
|
||||
## Comment l'obtenir
|
||||
|
||||
Si vous souhaitez contribuer à une disposition de clavier (keymap), ou à des fonctionnalités de QMK alors le plus simple est de [forker le dépôt avec Github](https://github.com/qmk/qmk_firmware#fork-destination-box) puis cloner le dépôt localement pour y faire des changements. Vous pourrez pousser vos changements sur github puis ouvrir un [Pull Request](https://github.com/qmk/qmk_firmware/pulls) depuis votre fork Github.
|
||||
Si vous souhaitez contribuer à une disposition de clavier (keymap), ou à des fonctionnalités de QMK alors le plus simple est de [forker le dépôt avec GitHub](https://github.com/qmk/qmk_firmware#fork-destination-box) puis cloner le dépôt localement pour y faire des changements. Vous pourrez pousser vos changements sur GitHub puis ouvrir un [Pull Request](https://github.com/qmk/qmk_firmware/pulls) depuis votre fork GitHub.
|
||||
|
||||
Sinon, vous pouvez aussi le télécharger directement en ([zip](https://github.com/qmk/qmk_firmware/zipball/master), [tar](https://github.com/qmk/qmk_firmware/tarball/master)), ou le cloner avec git en ssh (`git@github.com:qmk/qmk_firmware.git`), ou https (`https://github.com/qmk/qmk_firmware.git`).
|
||||
|
||||
|
||||
@@ -101,7 +101,7 @@ Ceci est fait immédiatement après la fusion de la branche `future` précédent
|
||||
* [ ] Regroupe ChangeLog dans un fichier.
|
||||
* [ ] `git commit -m 'Merge point for <DATE> Breaking Change'`
|
||||
* [ ] `git push origin future`
|
||||
* Actions sur Github
|
||||
* Actions sur GitHub
|
||||
* [ ] Crée un PR pour `future`
|
||||
* [ ] S'assurer que Travis ne relève aucun problème
|
||||
* [ ] Fusion le PR `future`
|
||||
|
||||
@@ -6,11 +6,11 @@ GitHub peut être un peu compliqué pour ceux qui n'y sont pas familier. Ce guid
|
||||
|
||||
Commencez par la [page GitHub de QMK](https://github.com/qmk/qmk_firmware), et vous verrez un bouton dans le coin en haut à droite qui indique "Fork":
|
||||
|
||||

|
||||

|
||||
|
||||
Si vous faites partie d'une organisation, vous aurez besoin de savoir quel compte utiliser pour le fork. Dans la plupart des cas, vous voudrez créer le fork dans votre compte personnel. Une fois le fork complet (cela peut quelques fois prendre un peu de temps), appuyez sur le bouton "Clone or download":
|
||||
|
||||

|
||||

|
||||
|
||||
Faites attention à sélectionner "HTTPS", et sélectionnez le lien et copiez-le:
|
||||
|
||||
|
||||
@@ -44,7 +44,7 @@ git pull upstream master
|
||||
git push origin master
|
||||
```
|
||||
|
||||
Cela vous change la branche courante en master, synchronise les données de références du dépôt QMK vers votre ordinateur. La commande pull tire les données de références vers votre branche courante puis les y téleverse. La commande push permet de pousser la branche courante (master) vers votre fork github.
|
||||
Cela vous change la branche courante en master, synchronise les données de références du dépôt QMK vers votre ordinateur. La commande pull tire les données de références vers votre branche courante puis les y téleverse. La commande push permet de pousser la branche courante (master) vers votre fork GitHub.
|
||||
|
||||
### Faire des changements
|
||||
|
||||
|
||||
47
docs/getting_started_docker.md
Normal file
47
docs/getting_started_docker.md
Normal file
@@ -0,0 +1,47 @@
|
||||
# Docker Quick Start
|
||||
|
||||
This project includes a Docker workflow that will allow you to build a new firmware for your keyboard very easily without major changes to your primary operating system. This also ensures that when you clone the project and perform a build, you have the exact same environment as anyone else and the QMK build infrastructure. This makes it much easier for people to help you troubleshoot any issues you encounter.
|
||||
|
||||
## Requirements
|
||||
|
||||
The main prerequisite is a working `docker` install.
|
||||
* [Docker CE](https://docs.docker.com/install/#supported-platforms)
|
||||
|
||||
## Usage
|
||||
|
||||
Acquire a local copy of the QMK's repository (including submodules):
|
||||
|
||||
```bash
|
||||
git clone --recurse-submodules https://github.com/qmk/qmk_firmware.git
|
||||
cd qmk_firmware
|
||||
```
|
||||
|
||||
Run the following command to build a keymap:
|
||||
```bash
|
||||
util/docker_build.sh <keyboard>:<keymap>
|
||||
# For example: util/docker_build.sh planck/rev6:default
|
||||
```
|
||||
|
||||
This will compile the desired keyboard/keymap and leave the resulting `.hex` or `.bin` file in the QMK directory for you to flash. If `:keymap` is omitted, all keymaps are used. Note that the parameter format is the same as when building with `make`.
|
||||
|
||||
There is also support for building _and_ flashing the keyboard straight from Docker by specifying the `target` as well:
|
||||
|
||||
```bash
|
||||
util/docker_build.sh keyboard:keymap:target
|
||||
# For example: util/docker_build.sh planck/rev6:default:flash
|
||||
```
|
||||
|
||||
You can also start the script without any parameters, in which case it will ask you to input the build parameters one by one, which you may find easier to use:
|
||||
|
||||
```bash
|
||||
util/docker_build.sh
|
||||
# Reads parameters as input (leave blank for all keyboards/keymaps)
|
||||
```
|
||||
|
||||
## FAQ
|
||||
|
||||
### Why can't I flash on Windows/macOS
|
||||
|
||||
On Windows and macOS, it requires [Docker Machine](http://gw.tnode.com/docker/docker-machine-with-usb-support-on-windows-macos/) to be running. This is tedious to set up, so it's not recommended; use [QMK Toolbox](https://github.com/qmk/qmk_toolbox) instead.
|
||||
|
||||
!> Docker for Windows requires [Hyper-V](https://docs.microsoft.com/en-us/virtualization/hyper-v-on-windows/quick-start/enable-hyper-v) to be enabled. This means that it cannot work on versions of Windows which don't have Hyper-V, such as Windows 7, Windows 8 and **Windows 10 Home**.
|
||||
@@ -1,16 +1,16 @@
|
||||
# How to Use Github with QMK
|
||||
# How to Use GitHub with QMK
|
||||
|
||||
Github can be a little tricky to those that aren't familiar with it - this guide will walk through each step of forking, cloning, and submitting a pull request with QMK.
|
||||
GitHub can be a little tricky to those that aren't familiar with it - this guide will walk through each step of forking, cloning, and submitting a pull request with QMK.
|
||||
|
||||
?> This guide assumes you're somewhat comfortable with running things at the command line, and have git installed on your system.
|
||||
|
||||
Start on the [QMK Github page](https://github.com/qmk/qmk_firmware), and you'll see a button in the upper right that says "Fork":
|
||||
Start on the [QMK GitHub page](https://github.com/qmk/qmk_firmware), and you'll see a button in the upper right that says "Fork":
|
||||
|
||||

|
||||

|
||||
|
||||
If you're a part of an organization, you'll need to choose which account to fork it to. In most circumstances, you'll want to fork it to your personal account. Once your fork is completed (sometimes this takes a little while), click the "Clone or Download" button:
|
||||
|
||||

|
||||

|
||||
|
||||
And be sure to select "HTTPS", and select the link and copy it:
|
||||
|
||||
@@ -54,7 +54,7 @@ To https://github.com/whoeveryouare/qmk_firmware.git
|
||||
+ 20043e64...7da94ac5 master -> master
|
||||
```
|
||||
|
||||
Your changes now exist on your fork on Github - if you go back there (`https://github.com/<whoeveryouare>/qmk_firmware`), you can create a "New Pull Request" by clicking this button:
|
||||
Your changes now exist on your fork on GitHub - if you go back there (`https://github.com/<whoeveryouare>/qmk_firmware`), you can create a "New Pull Request" by clicking this button:
|
||||
|
||||

|
||||
|
||||
|
||||
@@ -14,7 +14,7 @@ QMK (*Quantum Mechanical Keyboard*) היא קהילת קוד פתוח (open sour
|
||||
|
||||
## איך להשיג אותה
|
||||
|
||||
אם אתם מתכננים לתרום מיפוי מקשים, מקלדת או יכולת ל QMK, הדבר הקל ביותר הוא [לעשות פורק לריפו בGithub](https://github.com/qmk/qmk_firmware#fork-destination-box), ולעשות קלון לריפו בסביבה המקומית ושם לבצע את השינויים שלכם, לדחוף אותם ולפתוח [Pull Request](https://github.com/qmk/qmk_firmware/pulls) מהפורק שלך.
|
||||
אם אתם מתכננים לתרום מיפוי מקשים, מקלדת או יכולת ל QMK, הדבר הקל ביותר הוא [לעשות פורק לריפו בGitHub](https://github.com/qmk/qmk_firmware#fork-destination-box), ולעשות קלון לריפו בסביבה המקומית ושם לבצע את השינויים שלכם, לדחוף אותם ולפתוח [Pull Request](https://github.com/qmk/qmk_firmware/pulls) מהפורק שלך.
|
||||
|
||||
אחרת, אפשר להוריד את הקושחה באופן ישיר ([zip](https://github.com/qmk/qmk_firmware/zipball/master), [tar](https://github.com/qmk/qmk_firmware/tarball/master)), או לשכפל אותה באמצעות git (`git@github.com:qmk/qmk_firmware.git`), או https (`https://github.com/qmk/qmk_firmware.git`).
|
||||
|
||||
|
||||
@@ -5,7 +5,7 @@
|
||||
* [מקורות ללמידה](he-il/newbs_learn_more_resources.md)
|
||||
* [בסיס QMK](he-il/README.md)
|
||||
* [מבוא לQMK](he-il/getting_started_introduction.md)
|
||||
* [איך להשתמש בGithub](he-il/getting_started_github.md)
|
||||
* [איך להשתמש בGitHub](he-il/getting_started_github.md)
|
||||
* [קבלת עזרה](he-il/getting_started_getting_help.md)
|
||||
* [שאלות נפוצות](he-il/faq.md)
|
||||
* [שאלות נפוצות כלליות](he-il/faq_general.md)
|
||||
@@ -27,7 +27,7 @@
|
||||
* [QMK CLI](he-il/cli.md)
|
||||
* [QMK CLI Config](he-il/cli_configuration.md)
|
||||
* [תרומה ל QMK](he-il/contributing.md)
|
||||
* [איך להשתמש בGithub](he-il/getting_started_github.md)
|
||||
* [איך להשתמש בGitHub](he-il/getting_started_github.md)
|
||||
* [קבלת עזרה](he-il/getting_started_getting_help.md)
|
||||
|
||||
* [שינויים משמעותיים](he-il/breaking_changes.md)
|
||||
|
||||
@@ -11,7 +11,7 @@
|
||||
|
||||
הפורום הרשמי של QMK נמצא ב - [/r/olkb](https://reddit.com/r/olkb) באתר [reddit.com](https://reddit.com).
|
||||
|
||||
## סוגיות Github
|
||||
## סוגיות GitHub
|
||||
|
||||
ניתן לפתוח [סוגייה ב-GitHub](https://github.com/qmk/qmk_firmware/issues). הדבר שימושי במיוחד כאשר הסוגיה דורשת דיון עמוק וארוך או דיבאגינג.
|
||||
</div>
|
||||
@@ -1,17 +1,17 @@
|
||||
<div dir="rtl" markdown="1">
|
||||
# איך להשתמש ב-Github עם QMK
|
||||
# איך להשתמש ב-GitHub עם QMK
|
||||
|
||||
Github עלול להיות קצת טריקי למי שלא מכיר את העבודה איתו - מדריך זה ילווה אתכם שלב אחר שלב דרך ביצוע פעולות fork, clone ו-pull request עם QMK.
|
||||
GitHub עלול להיות קצת טריקי למי שלא מכיר את העבודה איתו - מדריך זה ילווה אתכם שלב אחר שלב דרך ביצוע פעולות fork, clone ו-pull request עם QMK.
|
||||
|
||||
?> מדריך זה מניח שאתם מרגישים בנוח עם הרצה של פקודות בסביבת command line (שורת הפקודה) ו-git מותקן במערכת שלכם.
|
||||
|
||||
התחילו ב- [עמוד של QMK ב-Github](https://github.com/qmk/qmk_firmware), ותצמאו כפתור בחלק העליון מימין עם התיכוב "Fork":
|
||||
התחילו ב- [עמוד של QMK ב-GitHub](https://github.com/qmk/qmk_firmware), ותצמאו כפתור בחלק העליון מימין עם התיכוב "Fork":
|
||||
|
||||

|
||||

|
||||
|
||||
אם אתם חלק מארגון, תצטרכו לבחור לאיזה חשבון לבצע פעולת fork. ברוב המבקרים, תרצו לבצע fork לתוך החשבון הפרטי שלכם. ברגע שה-fork הסתיים (לפעמים זה יכול לקחת קצת זמן) הקליקו על כפתור ה-"Clone or Download":
|
||||
|
||||

|
||||

|
||||
|
||||
תוודאו שאתם בוחרים באופצייה של "HTTPS", בחרו את הקישור והעתיקו אותו:
|
||||
|
||||
|
||||
@@ -113,7 +113,7 @@ compile.keymap: skully -> None
|
||||
|-----|---------------|-------------|
|
||||
| user.keyboard | None | キーボードのパス (例: `clueboard/66/rev4`) |
|
||||
| user.keymap | None | キーマップ名 (例: `default`) |
|
||||
| user.name | None | ユーザの github のユーザ名。 |
|
||||
| user.name | None | ユーザの GitHub のユーザ名。 |
|
||||
|
||||
# 全ての設定オプション
|
||||
|
||||
|
||||
49
docs/ja/feature_pointing_device.md
Normal file
49
docs/ja/feature_pointing_device.md
Normal file
@@ -0,0 +1,49 @@
|
||||
# ポインティングデバイス :id=pointing-device
|
||||
|
||||
<!---
|
||||
original document: 0.8.182:docs/feature_pointing_device.md
|
||||
git diff 0.8.182 HEAD -- docs/feature_pointing_device.md | cat
|
||||
-->
|
||||
|
||||
ポインティングデバイスは汎用的な機能の総称です: システムポインタを移動します。マウスキーのような他のオプションも確かにありますが、これは簡単に変更可能で軽量であることを目指しています。機能を制御するためにカスタムキーを実装したり、他の周辺機器から情報を収集してここに直接挿入したりできます - QMK に処理を任せてください。
|
||||
|
||||
ポインティングデバイスを有効にするには、rules.mk の以下の行のコメントを解除します:
|
||||
|
||||
```makefile
|
||||
POINTING_DEVICE_ENABLE = yes
|
||||
```
|
||||
|
||||
マウスレポートを操作するために、以下の関数を使うことができます:
|
||||
|
||||
* `pointing_device_get_report()` - ホストコンピュータに送信された情報を表す現在の report_mouse_t を返します。
|
||||
* `pointing_device_set_report(report_mouse_t newMouseReport)` - ホストコンピュータに送信される report_mouse_t を上書き保存します。
|
||||
|
||||
report_mouse_t (ここでは "mouseReport") が以下のプロパティを持つことを覚えておいてください:
|
||||
|
||||
* `mouseReport.x` - これは、x軸の動き(+ 右へ、- 左へ)を表す -127 から 127 (128ではなく、USB HID 仕様で定義されています)の符号付き整数です。
|
||||
* `mouseReport.y` - これは、y軸の動き(+ 上へ、- 下へ)を表す -127 から 127 (128ではなく、USB HID 仕様で定義されています)の符号付き整数です。
|
||||
* `mouseReport.v` - これは、垂直スクロール(+ 上へ、- 下へ)を表す -127 から 127 (128ではなく、USB HID 仕様で定義されています)の符号付き整数です。
|
||||
* `mouseReport.h` - これは、水平スクロール(+ 右へ、- 左へ)を表す -127 から 127 (128ではなく、USB HID 仕様で定義されています)の符号付き整数です。
|
||||
* `mouseReport.buttons` - これは uint8_t で、上位の5ビットを使っています。これらのビットはマウスボタンの状態を表します - ビット 3 はマウスボタン 5、ビット 7 はマウスボタン 1 です。
|
||||
|
||||
マウスレポートが送信されると、x、y、v、h のいずれの値も 0 に設定されます (これは "pointing_device_send()" で行われます。この挙動を回避するためにオーバーライドすることができます)。このように、ボタンの状態は持続しますが、動きは1度だけ起こります。さらにカスタマイズするために、`pointing_device_init` と `pointing_device_task` のどちらもオーバーライドすることができます。
|
||||
|
||||
以下の例では、カスタムキーを使ってマウスをクリックし垂直および水平方向に127単位スクロールし、リリースされた時にそれを全て元に戻します - なぜならこれは完全に便利な機能だからです。いいですか、以下はひとつの例です:
|
||||
|
||||
```c
|
||||
case MS_SPECIAL:
|
||||
report_mouse_t currentReport = pointing_device_get_report();
|
||||
if (record->event.pressed) {
|
||||
currentReport.v = 127;
|
||||
currentReport.h = 127;
|
||||
currentReport.buttons |= MOUSE_BTN1; // this is defined in report.h
|
||||
} else {
|
||||
currentReport.v = -127;
|
||||
currentReport.h = -127;
|
||||
currentReport.buttons &= ~MOUSE_BTN1;
|
||||
}
|
||||
pointing_device_set_report(currentReport);
|
||||
break;
|
||||
```
|
||||
|
||||
マウスレポートは送信されるたびに 0 (ボタンを除く)に設定されることを思い出してください。そのため、スクロールはそれぞれの場合に1度だけ発生します。
|
||||
@@ -1,15 +1,15 @@
|
||||
# QMK で Github を使う方法
|
||||
# QMK で GitHub を使う方法
|
||||
|
||||
<!---
|
||||
original document: 0.8.82:docs/getting_started_github.md
|
||||
git diff 0.8.82 HEAD -- docs/getting_started_github.md | cat
|
||||
-->
|
||||
|
||||
Github は慣れていない人には少し注意が必要です - このガイドは、QMK におけるフォーク、クローン、プルリクエストのサブミットの各ステップについて説明します。
|
||||
GitHub は慣れていない人には少し注意が必要です - このガイドは、QMK におけるフォーク、クローン、プルリクエストのサブミットの各ステップについて説明します。
|
||||
|
||||
?> このガイドでは、あなたがコマンドラインでの実行にある程度慣れており、システムに git がインストールされていることを前提にしています。
|
||||
|
||||
[QMK Github ページ](https://github.com/qmk/qmk_firmware)を開くと、右上に "Fork" というボタンが見えます:
|
||||
[QMK GitHub ページ](https://github.com/qmk/qmk_firmware)を開くと、右上に "Fork" というボタンが見えます:
|
||||
|
||||

|
||||
|
||||
@@ -59,7 +59,7 @@ To https://github.com/whoeveryouare/qmk_firmware.git
|
||||
+ 20043e64...7da94ac5 master -> master
|
||||
```
|
||||
|
||||
あなたの変更は今では Github 上のフォークにあります - フォーク (`https://github.com/<whoeveryouare>/qmk_firmware`)に戻ると、"New Pull Request" ボタンをクリックすることで新しいプルリクエストを作成することができます:
|
||||
あなたの変更は今では GitHub 上のフォークにあります - フォーク (`https://github.com/<whoeveryouare>/qmk_firmware`)に戻ると、"New Pull Request" ボタンをクリックすることで新しいプルリクエストを作成することができます:
|
||||
|
||||

|
||||
|
||||
|
||||
@@ -28,7 +28,7 @@ QMK Configurator は Chrome/Firefox で最適に動作します。
|
||||
|
||||
キーボードが QMK を搭載していると宣伝されていてもリストにない場合は、開発者がまだ作業中か、私たちがまだマージするきっかけがなかった可能性があります。
|
||||
アクティブな [Pull Request](https://github.com/qmk/qmk_firmware/pulls?q=is%3Aopen+is%3Apr+label%3Akeyboard) がない場合、[qmk_firmware](https://github.com/qmk/qmk_firmware/issues)で報告して、その特定のキーボードのサポートをリクエストします。
|
||||
製作者自身の github アカウントにある QMK 搭載キーボードもあります。
|
||||
製作者自身の GitHub アカウントにある QMK 搭載キーボードもあります。
|
||||
それも再確認してください。
|
||||
|
||||
## キーボードのレイアウトを選択する
|
||||
|
||||
@@ -14,7 +14,7 @@
|
||||
|
||||
* [Great General Tutorial](https://www.codecademy.com/learn/learn-git)
|
||||
* [Git Game To Learn From Examples](https://learngitbranching.js.org/)
|
||||
* [Git Resources to Learn More About Github](getting_started_github.md)
|
||||
* [Git Resources to Learn More About GitHub](getting_started_github.md)
|
||||
* [Git Resources Aimed Specifically toward QMK](contributing.md)
|
||||
|
||||
### 日本語
|
||||
@@ -22,7 +22,7 @@
|
||||
_日本語のリソース情報を募集中です。_
|
||||
|
||||
* [Git Game To Learn From Examples(日本語対応有り)](https://learngitbranching.js.org/)
|
||||
* [QMK で Github を使う方法](ja/getting_started_github.md)
|
||||
* [QMK で GitHub を使う方法](ja/getting_started_github.md)
|
||||
* [貢献方法](ja/contributing.md)
|
||||
|
||||
## コマンドラインに関するリソース:
|
||||
|
||||
@@ -1,18 +1,41 @@
|
||||
# Flashing Your Keyboard
|
||||
# Flashing Your Keyboard
|
||||
|
||||
Now that you've built a custom firmware file you'll want to flash your keyboard.
|
||||
Now that you've built a custom firmware file you'll want to flash your keyboard.
|
||||
|
||||
## Put Your Keyboard into DFU (Bootloader) Mode
|
||||
|
||||
In order to flash your custom firmware you must first put your keyboard into a special flashing mode. While it is in this mode you will not be able to type or otherwise use your keyboard. It is very important that you do not unplug the keyboard or otherwise interrupt the flashing process while the firmware is being written.
|
||||
|
||||
Different keyboards have different ways to enter this special mode. If your PCB currently runs QMK, TMK, or PS2AVRGB (Bootmapper Client) and you have not been given specific instructions, try the following, in order:
|
||||
|
||||
* Hold down both shift keys and press `Pause`
|
||||
* Hold down both shift keys and press `B`
|
||||
* Unplug your keyboard, hold down the Spacebar and `B` at the same time, plug in your keyboard and wait a second before releasing the keys
|
||||
* Unplug your keyboard, hold down the top or bottom left key (usually Escape or Left Control) and plug in your keyboard
|
||||
* Press the physical `RESET` button, usually located on the underside of the PCB
|
||||
* Locate header pins on the PCB labeled `RESET` and `GND`, and short them together while plugging your PCB in
|
||||
|
||||
If you've attempted all of the above to no avail, and the main chip on the board says `STM32` on it, this may be a bit more complicated. Generally your best bet is to ask on [Discord](https://discord.gg/Uq7gcHh) for assistance. It's likely some photos of the board will be asked for -- if you can get them ready beforehand it'll help move things along!
|
||||
|
||||
Otherwise, you should see a message in yellow, similar to this in QMK Toolbox:
|
||||
|
||||
```
|
||||
*** DFU device connected: Atmel Corp. ATmega32U4 (03EB:2FF4:0000)
|
||||
```
|
||||
|
||||
and this bootloader device will also be present in Device Manager, System Information.app, or `lsusb`.
|
||||
|
||||
## Flashing Your Keyboard with QMK Toolbox
|
||||
|
||||
The simplest way to flash your keyboard will be with the [QMK Toolbox](https://github.com/qmk/qmk_toolbox/releases).
|
||||
The simplest way to flash your keyboard will be with the [QMK Toolbox](https://github.com/qmk/qmk_toolbox/releases).
|
||||
|
||||
However, the QMK Toolbox is only available for Windows and macOS currently. If you're using Linux (or just wish to flash the firmware from the command line), proceed down to [Flash Your Keyboard From The Command Line](#flash-your-keyboard-from-the-command-line).
|
||||
However, the Toolbox is currently only available for Windows and macOS. If you're using Linux (or just wish to flash the firmware from the command line), skip to the [Flash your Keyboard from the Command Line](#flash-your-keyboard-from-the-command-line) section.
|
||||
|
||||
### Load The File Into QMK Toolbox
|
||||
### Load the File into QMK Toolbox
|
||||
|
||||
Begin by opening the QMK Toolbox application. You'll want to locate the firmware file in Finder or Explorer. Your keyboard firmware may be in one of two formats- `.hex` or `.bin`. QMK tries to copy the appropriate one for your keyboard into the root `qmk_firmware` directory.
|
||||
|
||||
If you are on Windows or macOS there are commands you can use to easily open the current firmware folder in Explorer or Finder.
|
||||
If you are on Windows or macOS, there are commands you can use to easily open the current folder in Explorer or Finder.
|
||||
|
||||
#### Windows
|
||||
|
||||
@@ -38,65 +61,44 @@ For example, the `planck/rev5` with a `default` keymap will have this filename:
|
||||
planck_rev5_default.hex
|
||||
```
|
||||
|
||||
Once you have located your firmware file drag it into the "Local file" box in QMK Toolbox, or click "Open" and navigate to where your firmware file is stored.
|
||||
|
||||
### Put Your Keyboard Into DFU (Bootloader) Mode
|
||||
|
||||
In order to flash your custom firmware you have to put your keyboard into a special flashing mode. While it is in this mode you will not be able to type or otherwise use your keyboard. It is very important that you do not unplug your keyboard or otherwise interrupt the flashing process while the firmware is being written.
|
||||
|
||||
Different keyboards have different ways to enter this special mode. If your PCB currently runs QMK or TMK and you have not been given specific instructions try the following, in order:
|
||||
|
||||
* Hold down both shift keys and press `Pause`
|
||||
* Hold down both shift keys and press `B`
|
||||
* Unplug your keyboard, hold down the Spacebar and `B` at the same time, plug in your keyboard and wait a second before releasing the keys
|
||||
* Press the physical `RESET` button on the bottom of the PCB
|
||||
* Locate header pins on the PCB labeled `BOOT0` or `RESET`, short those together while plugging your PCB in
|
||||
|
||||
When you are successful you will see a message similar to this in QMK Toolbox:
|
||||
|
||||
```
|
||||
*** Clueboard - Clueboard 66% HotSwap disconnected -- 0xC1ED:0x2390
|
||||
*** DFU device connected
|
||||
```
|
||||
Once you have located your firmware file drag it into the "Local file" box in QMK Toolbox, or click "Open" and navigate to where your firmware file is stored.
|
||||
|
||||
### Flash Your Keyboard
|
||||
|
||||
Click the `Flash` button in QMK Toolbox. You will see output similar to the following:
|
||||
|
||||
```
|
||||
*** Clueboard - Clueboard 66% HotSwap disconnected -- 0xC1ED:0x2390
|
||||
*** DFU device connected
|
||||
*** DFU device connected: Atmel Corp. ATmega32U4 (03EB:2FF4:0000)
|
||||
*** Attempting to flash, please don't remove device
|
||||
>>> dfu-programmer atmega32u4 erase --force
|
||||
>>> dfu-programmer.exe atmega32u4 erase --force
|
||||
Erasing flash... Success
|
||||
Checking memory from 0x0 to 0x6FFF... Empty.
|
||||
>>> dfu-programmer atmega32u4 flash /Users/skully/qmk_firmware/clueboard_66_hotswap_gen1_skully.hex
|
||||
Checking memory from 0x0 to 0x55FF... Empty.
|
||||
0% 100% Programming 0x5600 bytes...
|
||||
>>> dfu-programmer.exe atmega32u4 flash "D:\Git\qmk_firmware\gh60_satan_default.hex"
|
||||
Checking memory from 0x0 to 0x3F7F... Empty.
|
||||
0% 100% Programming 0x3F80 bytes...
|
||||
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] Success
|
||||
0% 100% Reading 0x7000 bytes...
|
||||
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] Success
|
||||
Validating... Success
|
||||
0x5600 bytes written into 0x7000 bytes memory (76.79%).
|
||||
>>> dfu-programmer atmega32u4 reset
|
||||
0x3F80 bytes written into 0x7000 bytes memory (56.70%).
|
||||
>>> dfu-programmer.exe atmega32u4 reset
|
||||
|
||||
*** DFU device disconnected
|
||||
*** Clueboard - Clueboard 66% HotSwap connected -- 0xC1ED:0x2390
|
||||
*** DFU device disconnected: Atmel Corp: ATmega32U4 (03EB:2FF4:0000)
|
||||
```
|
||||
|
||||
## Flash your Keyboard from the Command Line
|
||||
|
||||
This has been made pretty simple compared to what it used to be. When you are ready to compile and flash your firmware, open up your terminal window and run the flash command:
|
||||
This has been made pretty simple compared to what it used to be. When you are ready to compile and flash your firmware, open up your terminal window and run the flash command:
|
||||
|
||||
qmk flash
|
||||
|
||||
If you have not configured your keyboard/keymap name, or you have multiple keyboards, you can specify the keyboard and keymap:
|
||||
If you have not configured your keyboard/keymap name in the CLI, or you have multiple keyboards, you can specify the keyboard and keymap:
|
||||
|
||||
qmk flash -kb <my_keyboard> -km <my_keymap>
|
||||
|
||||
This will check the keyboard's configuration, and then attempt to flash it based on the specified bootloader. This means that you don't need to know which bootloader that your keyboard uses. Just run the command, and let the command do the heavy lifting.
|
||||
This will check the keyboard's configuration, and then attempt to flash it based on the specified bootloader. This means that you don't need to know which bootloader that your keyboard uses. Just run the command, and let the command do the heavy lifting.
|
||||
|
||||
However, this does rely on the bootloader being set by the keyboard. If this information is not configured, or you're using a board that doesn't have a supported target to flash it, you will see this error:
|
||||
However, this does rely on the bootloader being set by the keyboard. If this information is not configured, or you're using a board that doesn't have a supported target to flash it, you will see this error:
|
||||
|
||||
WARNING: This board's bootloader is not specified or is not supported by the ":flash" target at this time.
|
||||
|
||||
|
||||
@@ -69,10 +69,21 @@ You will need to install Git and Python. It's very likely that you already have
|
||||
* Fedora / Red Hat / CentOS: `sudo yum install git python3 python3-pip`
|
||||
* Arch / Manjaro: `sudo pacman -S git python python-pip python-setuptools libffi`
|
||||
|
||||
|
||||
Install the global CLI to bootstrap your system:
|
||||
|
||||
`python3 -m pip install --user qmk` (on Arch-based distros you can also try the `qmk` package from AUR (**note**: it's maintained by a community member): `yay -S qmk`)
|
||||
`python3 -m pip install --user qmk` (on Arch-based distros you can also try the `qmk` package from AUR (**note**: it's maintained by a community member): `yay -S qmk`)
|
||||
|
||||
### FreeBSD
|
||||
|
||||
You will need to install Git and Python. It's possible that you already have both, but if not, run the following commands to install them:
|
||||
|
||||
pkg install git python3
|
||||
|
||||
Make sure that `$HOME/.local/bin` is added to your `$PATH` so that locally install Python packages are available.
|
||||
|
||||
Once installed, you can install QMK CLI:
|
||||
|
||||
python3 -m pip install --user qmk
|
||||
|
||||
## 3. Run QMK Setup :id=set-up-qmk
|
||||
|
||||
@@ -88,6 +99,12 @@ This is due to a [bug](https://bugs.debian.org/cgi-bin/bugreport.cgi?bug=839155)
|
||||
Sadly, Ubuntu reitroduced this bug and is [yet to fix it](https://bugs.launchpad.net/ubuntu/+source/bash/+bug/1588562).
|
||||
Luckily, the fix is easy. Run this as your user: `echo "PATH=$HOME/.local/bin:$PATH" >> $HOME/.bashrc && source $HOME/.bashrc`
|
||||
|
||||
?>**Note on FreeBSD**:
|
||||
It is suggested to run `qmk setup` as a non-`root` user to start with, but this will likely identify packages that need to be installed to your
|
||||
base system using `pkg`. However the installation will probably fail when run as an unprivileged user.
|
||||
To manually install the base dependencies, run `./util/qmk_install.sh` either as `root`, or with `sudo`.
|
||||
Once that completes, re-run `qmk setup` to complete the setup and checks.
|
||||
|
||||
?> If you already know [how to use GitHub](getting_started_github.md), we recommend that you create your own fork and use `qmk setup <github_username>/qmk_firmware` to clone your personal fork. If you don't know what that means you can safely ignore this message.
|
||||
|
||||
## 4. Test Your Build Environment
|
||||
@@ -118,7 +135,7 @@ Most people new to QMK only have 1 keyboard. You can set this keyboard as your d
|
||||
|
||||
qmk config user.keyboard=clueboard/66/rev4
|
||||
|
||||
You can also set your default keymap name. Most people use their github username here, and we recommend that you do too.
|
||||
You can also set your default keymap name. Most people use their GitHub username here, and we recommend that you do too.
|
||||
|
||||
qmk config user.keymap=<github_username>
|
||||
|
||||
|
||||
@@ -102,7 +102,7 @@ There are a number of extensions that you may want to install:
|
||||
This installs a bunch of Git related tools that may make using Git with QMK Firmware easier.
|
||||
* [EditorConfig for VS Code](https://marketplace.visualstudio.com/items?itemName=EditorConfig.EditorConfig) - _[Optional]_ - Helps to keep the code to the QMK Coding Conventions.
|
||||
* [Bracket Pair Colorizer 2](https://marketplace.visualstudio.com/items?itemName=CoenraadS.bracket-pair-colorizer-2) - _[Optional]_ - This color codes the brackets in your code, to make it easier to reference nested code.
|
||||
* [Github Markdown Preview](https://marketplace.visualstudio.com/items?itemName=bierner.github-markdown-preview) - _[Optional]_ - Makes the markdown preview in VS Code more like GitHub's.
|
||||
* [GitHub Markdown Preview](https://marketplace.visualstudio.com/items?itemName=bierner.github-markdown-preview) - _[Optional]_ - Makes the markdown preview in VS Code more like GitHub's.
|
||||
* [VS Live Share Extension Pack](https://marketplace.visualstudio.com/items?itemName=MS-vsliveshare.vsliveshare-pack) - _[Optional]_ - This extension allows somebody else to access your workspace (or you to access somebody else's workspace) and help out. This is great if you're having issues and need some help from somebody.
|
||||
* [VIM Keymap](https://marketplace.visualstudio.com/items?itemName=GiuseppeCesarano.vim-keymap) - _[Optional]_ - For those that prefer VIM style keybindings. There are other options for this, too.
|
||||
* [Travis CI Status](https://marketplace.visualstudio.com/items?itemName=felixrieseberg.vsc-travis-ci-status) - _[Optional]_ - This shows the current Travis CI status, if you have it set up.
|
||||
|
||||
@@ -36,7 +36,7 @@ These are defaults based on what has been implemented for ARM boards.
|
||||
| [RGB Lighting](feature_rgblight.md) | Disabled |
|
||||
| [Backlight](feature_backlight.md) | Forces [task driven PWM](feature_backlight.md#software-pwm-driver) until ARM can provide automatic configuration |
|
||||
| USB Host (e.g. USB-USB converter) | Not supported (USB host code is AVR specific and is not currently supported on ARM) |
|
||||
| [Split keyboards](feature_split_keyboard.md) | Not supported yet |
|
||||
| [Split keyboards](feature_split_keyboard.md) | Partial - heavily dependent on enabled features |
|
||||
|
||||
## Manual Conversion
|
||||
|
||||
|
||||
@@ -12,7 +12,7 @@ QMK (*Quantum Mechanical Keyboard*) é uma comunidade de código aberto que mant
|
||||
|
||||
## Como obter e usar o QMK
|
||||
|
||||
Se você planeja contribuir com um _keymap_ ("mapa de teclas"), teclado ou recursos para o QMK, o jeito mais fácil é [percorrer o repositório através do Github](https://github.com/qmk/qmk_firmware#fork-destination-box) e clonar seu repositório localmente para fazer suas alterações, dê um _push_ nelas e abra uma [_Pull request_](https://github.com/qmk/qmk_firmware/pulls) no seu fork.
|
||||
Se você planeja contribuir com um _keymap_ ("mapa de teclas"), teclado ou recursos para o QMK, o jeito mais fácil é [percorrer o repositório através do GitHub](https://github.com/qmk/qmk_firmware#fork-destination-box) e clonar seu repositório localmente para fazer suas alterações, dê um _push_ nelas e abra uma [_Pull request_](https://github.com/qmk/qmk_firmware/pulls) no seu fork.
|
||||
|
||||
Caso contrário, você pode cloná-lo diretamente com `git clone https://github.com/qmk/qmk_firmware`. Não faça o download dos arquivos zip ou tar; é necessário um repositório git para baixar os submódulos para compilar.
|
||||
|
||||
|
||||
@@ -11,7 +11,7 @@
|
||||
* [QMK CLI](pt-br/cli.md)
|
||||
* [QMK CLI Config](pt-br/cli_configuration.md)
|
||||
* [Contributing to QMK](pt-br/contributing.md)
|
||||
* [How to Use Github](pt-br/getting_started_github.md)
|
||||
* [How to Use GitHub](pt-br/getting_started_github.md)
|
||||
* [Getting Help](pt-br/getting_started_getting_help.md)
|
||||
|
||||
* [Breaking Changes](pt-br/breaking_changes.md)
|
||||
|
||||
@@ -11,7 +11,7 @@
|
||||
* [QMK CLI](ru-ru/cli.md)
|
||||
* [QMK CLI Config](ru-ru/cli_configuration.md)
|
||||
* [Contributing to QMK](ru-ru/contributing.md)
|
||||
* [How to Use Github](ru-ru/getting_started_github.md)
|
||||
* [How to Use GitHub](ru-ru/getting_started_github.md)
|
||||
* [Getting Help](ru-ru/getting_started_getting_help.md)
|
||||
|
||||
* [Breaking Changes](ru-ru/breaking_changes.md)
|
||||
|
||||
@@ -6,10 +6,10 @@ GitHub может показаться несколько сложным для
|
||||
|
||||
Откройте [страницу QMK на GitHub] (https://github.com/qmk/qmk_firmware), и в правом верхнем углу вы увидите кнопку с надписью "Fork":
|
||||
|
||||

|
||||

|
||||
|
||||
Если вы состоите в какой-либо организации, вам нужно выбрать учетную запись, к которой будет привязан форк. В большинстве случаев это будет личной аккаунт. Как только ваш форк будет завершен (иногда это занимает немного времени), нажмите кнопку "Clone or Download":
|
||||

|
||||

|
||||
|
||||
И обязательно выберите "HTTPS", затем выделите ссылку и скопируйте ее:
|
||||
|
||||
|
||||
69
docs/serial_driver.md
Normal file
69
docs/serial_driver.md
Normal file
@@ -0,0 +1,69 @@
|
||||
# 'serial' Driver
|
||||
This driver powers the [Split Keyboard](feature_split_keyboard.md) feature.
|
||||
|
||||
?> Serial in this context should be read as **sending information one bit at a time**, rather than implementing UART/USART/RS485/RS232 standards.
|
||||
|
||||
All drivers in this category have the following characteristics:
|
||||
* Provides data and signaling over a single conductor
|
||||
* Limited to single master, single slave
|
||||
|
||||
## Supported Driver Types
|
||||
|
||||
| | AVR | ARM |
|
||||
|-------------------|--------------------|--------------------|
|
||||
| bit bang | :heavy_check_mark: | :heavy_check_mark: |
|
||||
| USART Half-duplex | | :heavy_check_mark: |
|
||||
|
||||
## Driver configuration
|
||||
|
||||
### Bitbang
|
||||
Default driver, the absence of configuration assumes this driver. To configure it, add this to your rules.mk:
|
||||
|
||||
```make
|
||||
SERIAL_DRIVER = bitbang
|
||||
```
|
||||
|
||||
Configure the driver via your config.h:
|
||||
```c
|
||||
#define SOFT_SERIAL_PIN D0 // or D1, D2, D3, E6
|
||||
#define SELECT_SOFT_SERIAL_SPEED 1 // or 0, 2, 3, 4, 5
|
||||
// 0: about 189kbps (Experimental only)
|
||||
// 1: about 137kbps (default)
|
||||
// 2: about 75kbps
|
||||
// 3: about 39kbps
|
||||
// 4: about 26kbps
|
||||
// 5: about 20kbps
|
||||
```
|
||||
|
||||
#### ARM
|
||||
|
||||
!> The bitbang driver causes connection issues with bitbang WS2812 driver
|
||||
|
||||
Along with the generic options above, you must also turn on the `PAL_USE_CALLBACKS` feature in your halconf.h.
|
||||
|
||||
### USART Half-duplex
|
||||
Targeting STM32 boards where communication is offloaded to a USART hardware device. The advantage is that this provides fast and accurate timings. `SOFT_SERIAL_PIN` for this driver is the configured USART TX pin. **The TX pin must have appropriate pull-up resistors**. To configure it, add this to your rules.mk:
|
||||
|
||||
```make
|
||||
SERIAL_DRIVER = usart
|
||||
```
|
||||
|
||||
Configure the hardware via your config.h:
|
||||
```c
|
||||
#define SOFT_SERIAL_PIN B6 // USART TX pin
|
||||
#define SELECT_SOFT_SERIAL_SPEED 1 // or 0, 2, 3, 4, 5
|
||||
// 0: about 460800 baud
|
||||
// 1: about 230400 baud (default)
|
||||
// 2: about 115200 baud
|
||||
// 3: about 57600 baud
|
||||
// 4: about 38400 baud
|
||||
// 5: about 19200 baud
|
||||
#define SERIAL_USART_DRIVER SD1 // USART driver of TX pin. default: SD1
|
||||
#define SERIAL_USART_TX_PAL_MODE 7 // Pin "alternate function", see the respective datasheet for the appropriate values for your MCU. default: 7
|
||||
```
|
||||
|
||||
You must also enable the ChibiOS `SERIAL` feature:
|
||||
* In your board's halconf.h: `#define HAL_USE_SERIAL TRUE`
|
||||
* In your board's mcuconf.h: `#define STM32_SERIAL_USE_USARTn TRUE` (where 'n' matches the peripheral number of your selected USART on the MCU)
|
||||
|
||||
Do note that the configuration required is for the `SERIAL` peripheral, not the `UART` peripheral.
|
||||
@@ -12,6 +12,6 @@ If you need help with something, the best place to get quick support is going to
|
||||
|
||||
The official QMK forum is [/r/olkb](https://reddit.com/r/olkb) on [reddit.com](https://reddit.com).
|
||||
|
||||
## Github Issues
|
||||
## GitHub Issues
|
||||
|
||||
You can open an [issue on GitHub](https://github.com/qmk/qmk_firmware/issues). This is especially handy when your issue will require long-term discussion or debugging.
|
||||
|
||||
@@ -13,7 +13,7 @@ QMK (*Quantum Mechanical Keyboard*) 是一个社区维护的开源软件,包
|
||||
|
||||
## 如何得到它
|
||||
|
||||
如果你打算贡献布局, 键盘, 或者其他QMK特性, 一下是最简单的方法:[从Github获得repo分支](https://github.com/qmk/qmk_firmware#fork-destination-box), 并克隆你的repo到本地进行编辑,推送,然后从你的分支打开 [Pull Request](https://github.com/qmk/qmk_firmware/pulls).
|
||||
如果你打算贡献布局, 键盘, 或者其他QMK特性, 一下是最简单的方法:[从GitHub获得repo分支](https://github.com/qmk/qmk_firmware#fork-destination-box), 并克隆你的repo到本地进行编辑,推送,然后从你的分支打开 [Pull Request](https://github.com/qmk/qmk_firmware/pulls).
|
||||
|
||||
此外, 你也可以直接下载 ([zip](https://github.com/qmk/qmk_firmware/zipball/master), [tar](https://github.com/qmk/qmk_firmware/tarball/master)), 或者从git克隆 (`git@github.com:qmk/qmk_firmware.git`), 或 https (`https://github.com/qmk/qmk_firmware.git`).
|
||||
|
||||
|
||||
@@ -14,7 +14,7 @@
|
||||
* [QMK命令行工具](zh-cn/cli.md)
|
||||
* [QMK命令行工具配置](zh-cn/cli_configuration.md)
|
||||
* [向QMK贡献代码](zh-cn/contributing.md)
|
||||
* [如何使用Github](zh-cn/getting_started_github.md)
|
||||
* [如何使用GitHub](zh-cn/getting_started_github.md)
|
||||
* [获得帮助](zh-cn/getting_started_getting_help.md)
|
||||
|
||||
* [非兼容性修改](zh-cn/breaking_changes.md)
|
||||
|
||||
@@ -10,6 +10,6 @@
|
||||
|
||||
QMK的官方论坛是[/r/olkb](https://reddit.com/r/olkb) 在[reddit.com](https://reddit.com)上.
|
||||
|
||||
## Github的Issue
|
||||
## GitHub的Issue
|
||||
|
||||
你可以在GitHub上 [提出issue](https://github.com/qmk/qmk_firmware/issues).当您的问题需要长期讨论或调试时,这尤其方便。
|
||||
|
||||
@@ -1,16 +1,16 @@
|
||||
# 如何在QMK中使用Github
|
||||
# 如何在QMK中使用GitHub
|
||||
|
||||
Github can be a little tricky to those that aren't familiar with it - this guide will walk through each step of forking, cloning, and submitting a pull request with QMK.
|
||||
GitHub can be a little tricky to those that aren't familiar with it - this guide will walk through each step of forking, cloning, and submitting a pull request with QMK.
|
||||
|
||||
?> 本教程假设您已安装GitHub,并且您喜欢使用命令行工作。
|
||||
|
||||
首先 [Github上的QMK页面](https://github.com/qmk/qmk_firmware), 您能看到右上方有个按钮写着"Fork":
|
||||
首先 [GitHub上的QMK页面](https://github.com/qmk/qmk_firmware), 您能看到右上方有个按钮写着"Fork":
|
||||
|
||||

|
||||

|
||||
|
||||
如果你是某组织成员,你将需要选择分叉到哪个账户。一般情况下, 你是想要分叉到你的私人账户下。当你完成分叉 (有时需要等一会), 点击"Clone or Download" 按钮:
|
||||
|
||||
!从Github下载](http://i.imgur.com/N1NYcSz.jpg)
|
||||
!从GitHub下载](http://i.imgur.com/N1NYcSz.jpg)
|
||||
|
||||
你要选择 "HTTPS", 然后选择链接复制:
|
||||
|
||||
@@ -54,7 +54,7 @@ To https://github.com/whoeveryouare/qmk_firmware.git
|
||||
+ 20043e64...7da94ac5 master -> master
|
||||
```
|
||||
|
||||
现在你的改动已经在你Github上的分支中了 - 如果你回到这 (`https://github.com/你的GitHub账户名/qmk_firmware`) ,你可以点击下方所示按钮创建 "New Pull Request":
|
||||
现在你的改动已经在你GitHub上的分支中了 - 如果你回到这 (`https://github.com/你的GitHub账户名/qmk_firmware`) ,你可以点击下方所示按钮创建 "New Pull Request":
|
||||
|
||||

|
||||
|
||||
|
||||
@@ -20,7 +20,7 @@
|
||||
|
||||
## 创建`default` 布局副本
|
||||
|
||||
打开`keymaps`文件夹后,您将需要创建`default`文件夹的副本。我们强烈建议您将文件夹命名为与Github用户名相同的名称,但您也可以使用任何您想使用的名称,只要它只包含小写字母、数字和下划线字符。
|
||||
打开`keymaps`文件夹后,您将需要创建`default`文件夹的副本。我们强烈建议您将文件夹命名为与GitHub用户名相同的名称,但您也可以使用任何您想使用的名称,只要它只包含小写字母、数字和下划线字符。
|
||||
|
||||
要自动执行此过程,您还可以选择运行`new_keymap.sh`脚本。
|
||||
|
||||
|
||||
@@ -2,7 +2,7 @@
|
||||
* APA102 lib V1.0a
|
||||
*
|
||||
* Controls APA102 RGB-LEDs
|
||||
* Author: Mikkel (Duckle29 on github)
|
||||
* Author: Mikkel (Duckle29 on GitHub)
|
||||
*
|
||||
* Dec 22th, 2017 v1.0a Initial Version
|
||||
*
|
||||
|
||||
@@ -14,7 +14,7 @@
|
||||
* along with this program. If not, see <https://www.gnu.org/licenses/>.
|
||||
*/
|
||||
/* Library made by: g4lvanix
|
||||
* Github repository: https://github.com/g4lvanix/I2C-master-lib
|
||||
* GitHub repository: https://github.com/g4lvanix/I2C-master-lib
|
||||
*/
|
||||
|
||||
#include <avr/io.h>
|
||||
|
||||
@@ -14,7 +14,7 @@
|
||||
* along with this program. If not, see <https://www.gnu.org/licenses/>.
|
||||
*/
|
||||
/* Library made by: g4lvanix
|
||||
* Github repository: https://github.com/g4lvanix/I2C-master-lib
|
||||
* GitHub repository: https://github.com/g4lvanix/I2C-master-lib
|
||||
*/
|
||||
|
||||
#ifndef I2C_MASTER_H
|
||||
|
||||
@@ -14,7 +14,7 @@
|
||||
* along with this program. If not, see <https://www.gnu.org/licenses/>.
|
||||
*/
|
||||
/* Library made by: g4lvanix
|
||||
* Github repository: https://github.com/g4lvanix/I2C-slave-lib
|
||||
* GitHub repository: https://github.com/g4lvanix/I2C-slave-lib
|
||||
*/
|
||||
|
||||
#include <avr/io.h>
|
||||
|
||||
@@ -14,7 +14,7 @@
|
||||
* along with this program. If not, see <https://www.gnu.org/licenses/>.
|
||||
*/
|
||||
/* Library made by: g4lvanix
|
||||
* Github repository: https://github.com/g4lvanix/I2C-slave-lib
|
||||
* GitHub repository: https://github.com/g4lvanix/I2C-slave-lib
|
||||
|
||||
Info: Inititate the library by giving the required address.
|
||||
Read or write to the necessary buffer according to the opperation.
|
||||
|
||||
290
drivers/chibios/serial.c
Normal file
290
drivers/chibios/serial.c
Normal file
@@ -0,0 +1,290 @@
|
||||
/*
|
||||
* WARNING: be careful changing this code, it is very timing dependent
|
||||
*/
|
||||
|
||||
#include "quantum.h"
|
||||
#include "serial.h"
|
||||
#include "wait.h"
|
||||
|
||||
#include "hal.h"
|
||||
|
||||
// TODO: resolve/remove build warnings
|
||||
#if defined(RGBLIGHT_ENABLE) && defined(RGBLED_SPLIT) && defined(PROTOCOL_CHIBIOS) && defined(WS2812_DRIVER_BITBANG)
|
||||
# warning "RGBLED_SPLIT not supported with bitbang WS2812 driver"
|
||||
#endif
|
||||
|
||||
// default wait implementation cannot be called within interrupt
|
||||
// this method seems to be more accurate than GPT timers
|
||||
#if PORT_SUPPORTS_RT == FALSE
|
||||
# error "chSysPolledDelayX method not supported on this platform"
|
||||
#else
|
||||
# undef wait_us
|
||||
# define wait_us(x) chSysPolledDelayX(US2RTC(STM32_SYSCLK, x))
|
||||
#endif
|
||||
|
||||
#ifndef SELECT_SOFT_SERIAL_SPEED
|
||||
# define SELECT_SOFT_SERIAL_SPEED 1
|
||||
// TODO: correct speeds...
|
||||
// 0: about 189kbps (Experimental only)
|
||||
// 1: about 137kbps (default)
|
||||
// 2: about 75kbps
|
||||
// 3: about 39kbps
|
||||
// 4: about 26kbps
|
||||
// 5: about 20kbps
|
||||
#endif
|
||||
|
||||
// Serial pulse period in microseconds. At the moment, going lower than 12 causes communication failure
|
||||
#if SELECT_SOFT_SERIAL_SPEED == 0
|
||||
# define SERIAL_DELAY 12
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 1
|
||||
# define SERIAL_DELAY 16
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 2
|
||||
# define SERIAL_DELAY 24
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 3
|
||||
# define SERIAL_DELAY 32
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 4
|
||||
# define SERIAL_DELAY 48
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 5
|
||||
# define SERIAL_DELAY 64
|
||||
#else
|
||||
# error invalid SELECT_SOFT_SERIAL_SPEED value
|
||||
#endif
|
||||
|
||||
inline static void serial_delay(void) { wait_us(SERIAL_DELAY); }
|
||||
inline static void serial_delay_half(void) { wait_us(SERIAL_DELAY / 2); }
|
||||
inline static void serial_delay_blip(void) { wait_us(1); }
|
||||
inline static void serial_output(void) { setPinOutput(SOFT_SERIAL_PIN); }
|
||||
inline static void serial_input(void) { setPinInputHigh(SOFT_SERIAL_PIN); }
|
||||
inline static bool serial_read_pin(void) { return !!readPin(SOFT_SERIAL_PIN); }
|
||||
inline static void serial_low(void) { writePinLow(SOFT_SERIAL_PIN); }
|
||||
inline static void serial_high(void) { writePinHigh(SOFT_SERIAL_PIN); }
|
||||
|
||||
void interrupt_handler(void *arg);
|
||||
|
||||
// Use thread + palWaitLineTimeout instead of palSetLineCallback
|
||||
// - Methods like setPinOutput and palEnableLineEvent/palDisableLineEvent
|
||||
// cause the interrupt to lock up, which would limit to only receiving data...
|
||||
static THD_WORKING_AREA(waThread1, 128);
|
||||
static THD_FUNCTION(Thread1, arg) {
|
||||
(void)arg;
|
||||
chRegSetThreadName("blinker");
|
||||
while (true) {
|
||||
palWaitLineTimeout(SOFT_SERIAL_PIN, TIME_INFINITE);
|
||||
interrupt_handler(NULL);
|
||||
}
|
||||
}
|
||||
|
||||
static SSTD_t *Transaction_table = NULL;
|
||||
static uint8_t Transaction_table_size = 0;
|
||||
|
||||
void soft_serial_initiator_init(SSTD_t *sstd_table, int sstd_table_size) {
|
||||
Transaction_table = sstd_table;
|
||||
Transaction_table_size = (uint8_t)sstd_table_size;
|
||||
|
||||
serial_output();
|
||||
serial_high();
|
||||
}
|
||||
|
||||
void soft_serial_target_init(SSTD_t *sstd_table, int sstd_table_size) {
|
||||
Transaction_table = sstd_table;
|
||||
Transaction_table_size = (uint8_t)sstd_table_size;
|
||||
|
||||
serial_input();
|
||||
|
||||
palEnablePadEvent(PAL_PORT(SOFT_SERIAL_PIN), PAL_PAD(SOFT_SERIAL_PIN), PAL_EVENT_MODE_FALLING_EDGE);
|
||||
chThdCreateStatic(waThread1, sizeof(waThread1), HIGHPRIO, Thread1, NULL);
|
||||
}
|
||||
|
||||
// Used by the master to synchronize timing with the slave.
|
||||
static void __attribute__((noinline)) sync_recv(void) {
|
||||
serial_input();
|
||||
// This shouldn't hang if the slave disconnects because the
|
||||
// serial line will float to high if the slave does disconnect.
|
||||
while (!serial_read_pin()) {
|
||||
}
|
||||
|
||||
serial_delay();
|
||||
}
|
||||
|
||||
// Used by the slave to send a synchronization signal to the master.
|
||||
static void __attribute__((noinline)) sync_send(void) {
|
||||
serial_output();
|
||||
|
||||
serial_low();
|
||||
serial_delay();
|
||||
|
||||
serial_high();
|
||||
}
|
||||
|
||||
// Reads a byte from the serial line
|
||||
static uint8_t __attribute__((noinline)) serial_read_byte(void) {
|
||||
uint8_t byte = 0;
|
||||
serial_input();
|
||||
for (uint8_t i = 0; i < 8; ++i) {
|
||||
byte = (byte << 1) | serial_read_pin();
|
||||
serial_delay();
|
||||
}
|
||||
|
||||
return byte;
|
||||
}
|
||||
|
||||
// Sends a byte with MSB ordering
|
||||
static void __attribute__((noinline)) serial_write_byte(uint8_t data) {
|
||||
uint8_t b = 8;
|
||||
serial_output();
|
||||
while (b--) {
|
||||
if (data & (1 << b)) {
|
||||
serial_high();
|
||||
} else {
|
||||
serial_low();
|
||||
}
|
||||
serial_delay();
|
||||
}
|
||||
}
|
||||
|
||||
// interrupt handle to be used by the slave device
|
||||
void interrupt_handler(void *arg) {
|
||||
chSysLockFromISR();
|
||||
|
||||
sync_send();
|
||||
|
||||
// read mid pulses
|
||||
serial_delay_blip();
|
||||
|
||||
uint8_t checksum_computed = 0;
|
||||
int sstd_index = 0;
|
||||
|
||||
#ifdef SERIAL_USE_MULTI_TRANSACTION
|
||||
sstd_index = serial_read_byte();
|
||||
sync_send();
|
||||
#endif
|
||||
|
||||
SSTD_t *trans = &Transaction_table[sstd_index];
|
||||
for (int i = 0; i < trans->initiator2target_buffer_size; ++i) {
|
||||
trans->initiator2target_buffer[i] = serial_read_byte();
|
||||
sync_send();
|
||||
checksum_computed += trans->initiator2target_buffer[i];
|
||||
}
|
||||
checksum_computed ^= 7;
|
||||
uint8_t checksum_received = serial_read_byte();
|
||||
sync_send();
|
||||
|
||||
// wait for the sync to finish sending
|
||||
serial_delay();
|
||||
|
||||
uint8_t checksum = 0;
|
||||
for (int i = 0; i < trans->target2initiator_buffer_size; ++i) {
|
||||
serial_write_byte(trans->target2initiator_buffer[i]);
|
||||
sync_send();
|
||||
serial_delay_half();
|
||||
checksum += trans->target2initiator_buffer[i];
|
||||
}
|
||||
serial_write_byte(checksum ^ 7);
|
||||
sync_send();
|
||||
|
||||
// wait for the sync to finish sending
|
||||
serial_delay();
|
||||
|
||||
*trans->status = (checksum_computed == checksum_received) ? TRANSACTION_ACCEPTED : TRANSACTION_DATA_ERROR;
|
||||
|
||||
// end transaction
|
||||
serial_input();
|
||||
|
||||
// TODO: remove extra delay between transactions
|
||||
serial_delay();
|
||||
|
||||
chSysUnlockFromISR();
|
||||
}
|
||||
|
||||
/////////
|
||||
// start transaction by initiator
|
||||
//
|
||||
// int soft_serial_transaction(int sstd_index)
|
||||
//
|
||||
// Returns:
|
||||
// TRANSACTION_END
|
||||
// TRANSACTION_NO_RESPONSE
|
||||
// TRANSACTION_DATA_ERROR
|
||||
// this code is very time dependent, so we need to disable interrupts
|
||||
#ifndef SERIAL_USE_MULTI_TRANSACTION
|
||||
int soft_serial_transaction(void) {
|
||||
int sstd_index = 0;
|
||||
#else
|
||||
int soft_serial_transaction(int sstd_index) {
|
||||
#endif
|
||||
|
||||
if (sstd_index > Transaction_table_size) return TRANSACTION_TYPE_ERROR;
|
||||
SSTD_t *trans = &Transaction_table[sstd_index];
|
||||
|
||||
// TODO: remove extra delay between transactions
|
||||
serial_delay();
|
||||
|
||||
// this code is very time dependent, so we need to disable interrupts
|
||||
chSysLock();
|
||||
|
||||
// signal to the slave that we want to start a transaction
|
||||
serial_output();
|
||||
serial_low();
|
||||
serial_delay_blip();
|
||||
|
||||
// wait for the slaves response
|
||||
serial_input();
|
||||
serial_high();
|
||||
serial_delay();
|
||||
|
||||
// check if the slave is present
|
||||
if (serial_read_pin()) {
|
||||
// slave failed to pull the line low, assume not present
|
||||
dprintf("serial::NO_RESPONSE\n");
|
||||
chSysUnlock();
|
||||
return TRANSACTION_NO_RESPONSE;
|
||||
}
|
||||
|
||||
// if the slave is present syncronize with it
|
||||
|
||||
uint8_t checksum = 0;
|
||||
// send data to the slave
|
||||
#ifdef SERIAL_USE_MULTI_TRANSACTION
|
||||
serial_write_byte(sstd_index); // first chunk is transaction id
|
||||
sync_recv();
|
||||
#endif
|
||||
for (int i = 0; i < trans->initiator2target_buffer_size; ++i) {
|
||||
serial_write_byte(trans->initiator2target_buffer[i]);
|
||||
sync_recv();
|
||||
checksum += trans->initiator2target_buffer[i];
|
||||
}
|
||||
serial_write_byte(checksum ^ 7);
|
||||
sync_recv();
|
||||
|
||||
serial_delay();
|
||||
serial_delay(); // read mid pulses
|
||||
|
||||
// receive data from the slave
|
||||
uint8_t checksum_computed = 0;
|
||||
for (int i = 0; i < trans->target2initiator_buffer_size; ++i) {
|
||||
trans->target2initiator_buffer[i] = serial_read_byte();
|
||||
sync_recv();
|
||||
checksum_computed += trans->target2initiator_buffer[i];
|
||||
}
|
||||
checksum_computed ^= 7;
|
||||
uint8_t checksum_received = serial_read_byte();
|
||||
|
||||
sync_recv();
|
||||
serial_delay();
|
||||
|
||||
if ((checksum_computed) != (checksum_received)) {
|
||||
dprintf("serial::FAIL[%u,%u,%u]\n", checksum_computed, checksum_received, sstd_index);
|
||||
serial_output();
|
||||
serial_high();
|
||||
|
||||
chSysUnlock();
|
||||
return TRANSACTION_DATA_ERROR;
|
||||
}
|
||||
|
||||
// always, release the line when not in use
|
||||
serial_high();
|
||||
serial_output();
|
||||
|
||||
chSysUnlock();
|
||||
return TRANSACTION_END;
|
||||
}
|
||||
62
drivers/chibios/serial.h
Normal file
62
drivers/chibios/serial.h
Normal file
@@ -0,0 +1,62 @@
|
||||
#pragma once
|
||||
|
||||
#include <stdbool.h>
|
||||
|
||||
// /////////////////////////////////////////////////////////////////
|
||||
// Need Soft Serial defines in config.h
|
||||
// /////////////////////////////////////////////////////////////////
|
||||
// ex.
|
||||
// #define SOFT_SERIAL_PIN ?? // ?? = D0,D1,D2,D3,E6
|
||||
// OPTIONAL: #define SELECT_SOFT_SERIAL_SPEED ? // ? = 1,2,3,4,5
|
||||
// // 1: about 137kbps (default)
|
||||
// // 2: about 75kbps
|
||||
// // 3: about 39kbps
|
||||
// // 4: about 26kbps
|
||||
// // 5: about 20kbps
|
||||
//
|
||||
// //// USE simple API (using signle-type transaction function)
|
||||
// /* nothing */
|
||||
// //// USE flexible API (using multi-type transaction function)
|
||||
// #define SERIAL_USE_MULTI_TRANSACTION
|
||||
//
|
||||
// /////////////////////////////////////////////////////////////////
|
||||
|
||||
// Soft Serial Transaction Descriptor
|
||||
typedef struct _SSTD_t {
|
||||
uint8_t *status;
|
||||
uint8_t initiator2target_buffer_size;
|
||||
uint8_t *initiator2target_buffer;
|
||||
uint8_t target2initiator_buffer_size;
|
||||
uint8_t *target2initiator_buffer;
|
||||
} SSTD_t;
|
||||
#define TID_LIMIT(table) (sizeof(table) / sizeof(SSTD_t))
|
||||
|
||||
// initiator is transaction start side
|
||||
void soft_serial_initiator_init(SSTD_t *sstd_table, int sstd_table_size);
|
||||
// target is interrupt accept side
|
||||
void soft_serial_target_init(SSTD_t *sstd_table, int sstd_table_size);
|
||||
|
||||
// initiator result
|
||||
#define TRANSACTION_END 0
|
||||
#define TRANSACTION_NO_RESPONSE 0x1
|
||||
#define TRANSACTION_DATA_ERROR 0x2
|
||||
#define TRANSACTION_TYPE_ERROR 0x4
|
||||
#ifndef SERIAL_USE_MULTI_TRANSACTION
|
||||
int soft_serial_transaction(void);
|
||||
#else
|
||||
int soft_serial_transaction(int sstd_index);
|
||||
#endif
|
||||
|
||||
// target status
|
||||
// *SSTD_t.status has
|
||||
// initiator:
|
||||
// TRANSACTION_END
|
||||
// or TRANSACTION_NO_RESPONSE
|
||||
// or TRANSACTION_DATA_ERROR
|
||||
// target:
|
||||
// TRANSACTION_DATA_ERROR
|
||||
// or TRANSACTION_ACCEPTED
|
||||
#define TRANSACTION_ACCEPTED 0x8
|
||||
#ifdef SERIAL_USE_MULTI_TRANSACTION
|
||||
int soft_serial_get_and_clean_status(int sstd_index);
|
||||
#endif
|
||||
234
drivers/chibios/serial_usart.c
Normal file
234
drivers/chibios/serial_usart.c
Normal file
@@ -0,0 +1,234 @@
|
||||
#include "quantum.h"
|
||||
#include "serial.h"
|
||||
#include "printf.h"
|
||||
|
||||
#include "ch.h"
|
||||
#include "hal.h"
|
||||
|
||||
#ifndef USART_CR1_M0
|
||||
# define USART_CR1_M0 USART_CR1_M // some platforms (f1xx) dont have this so
|
||||
#endif
|
||||
|
||||
#ifndef USE_GPIOV1
|
||||
// The default PAL alternate modes are used to signal that the pins are used for USART
|
||||
# ifndef SERIAL_USART_TX_PAL_MODE
|
||||
# define SERIAL_USART_TX_PAL_MODE 7
|
||||
# endif
|
||||
#endif
|
||||
|
||||
#ifndef SERIAL_USART_DRIVER
|
||||
# define SERIAL_USART_DRIVER SD1
|
||||
#endif
|
||||
|
||||
#ifndef SERIAL_USART_CR1
|
||||
# define SERIAL_USART_CR1 (USART_CR1_PCE | USART_CR1_PS | USART_CR1_M0) // parity enable, odd parity, 9 bit length
|
||||
#endif
|
||||
|
||||
#ifndef SERIAL_USART_CR2
|
||||
# define SERIAL_USART_CR2 (USART_CR2_STOP_1) // 2 stop bits
|
||||
#endif
|
||||
|
||||
#ifndef SERIAL_USART_CR3
|
||||
# define SERIAL_USART_CR3 0
|
||||
#endif
|
||||
|
||||
#ifdef SOFT_SERIAL_PIN
|
||||
# define SERIAL_USART_TX_PIN SOFT_SERIAL_PIN
|
||||
#endif
|
||||
|
||||
#ifndef SELECT_SOFT_SERIAL_SPEED
|
||||
# define SELECT_SOFT_SERIAL_SPEED 1
|
||||
#endif
|
||||
|
||||
#ifdef SERIAL_USART_SPEED
|
||||
// Allow advanced users to directly set SERIAL_USART_SPEED
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 0
|
||||
# define SERIAL_USART_SPEED 460800
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 1
|
||||
# define SERIAL_USART_SPEED 230400
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 2
|
||||
# define SERIAL_USART_SPEED 115200
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 3
|
||||
# define SERIAL_USART_SPEED 57600
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 4
|
||||
# define SERIAL_USART_SPEED 38400
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 5
|
||||
# define SERIAL_USART_SPEED 19200
|
||||
#else
|
||||
# error invalid SELECT_SOFT_SERIAL_SPEED value
|
||||
#endif
|
||||
|
||||
#define TIMEOUT 100
|
||||
#define HANDSHAKE_MAGIC 7
|
||||
|
||||
static inline msg_t sdWriteHalfDuplex(SerialDriver* driver, uint8_t* data, uint8_t size) {
|
||||
msg_t ret = sdWrite(driver, data, size);
|
||||
|
||||
// Half duplex requires us to read back the data we just wrote - just throw it away
|
||||
uint8_t dump[size];
|
||||
sdRead(driver, dump, size);
|
||||
|
||||
return ret;
|
||||
}
|
||||
#undef sdWrite
|
||||
#define sdWrite sdWriteHalfDuplex
|
||||
|
||||
static inline msg_t sdWriteTimeoutHalfDuplex(SerialDriver* driver, uint8_t* data, uint8_t size, uint32_t timeout) {
|
||||
msg_t ret = sdWriteTimeout(driver, data, size, timeout);
|
||||
|
||||
// Half duplex requires us to read back the data we just wrote - just throw it away
|
||||
uint8_t dump[size];
|
||||
sdReadTimeout(driver, dump, size, timeout);
|
||||
|
||||
return ret;
|
||||
}
|
||||
#undef sdWriteTimeout
|
||||
#define sdWriteTimeout sdWriteTimeoutHalfDuplex
|
||||
|
||||
static inline void sdClear(SerialDriver* driver) {
|
||||
while (sdGetTimeout(driver, TIME_IMMEDIATE) != MSG_TIMEOUT) {
|
||||
// Do nothing with the data
|
||||
}
|
||||
}
|
||||
|
||||
static SerialConfig sdcfg = {
|
||||
(SERIAL_USART_SPEED), // speed - mandatory
|
||||
(SERIAL_USART_CR1), // CR1
|
||||
(SERIAL_USART_CR2), // CR2
|
||||
(SERIAL_USART_CR3) // CR3
|
||||
};
|
||||
|
||||
void handle_soft_serial_slave(void);
|
||||
|
||||
/*
|
||||
* This thread runs on the slave and responds to transactions initiated
|
||||
* by the master
|
||||
*/
|
||||
static THD_WORKING_AREA(waSlaveThread, 2048);
|
||||
static THD_FUNCTION(SlaveThread, arg) {
|
||||
(void)arg;
|
||||
chRegSetThreadName("slave_transport");
|
||||
|
||||
while (true) {
|
||||
handle_soft_serial_slave();
|
||||
}
|
||||
}
|
||||
|
||||
__attribute__((weak)) void usart_init(void) {
|
||||
#if defined(USE_GPIOV1)
|
||||
palSetLineMode(SERIAL_USART_TX_PIN, PAL_MODE_STM32_ALTERNATE_OPENDRAIN);
|
||||
#else
|
||||
palSetLineMode(SERIAL_USART_TX_PIN, PAL_MODE_ALTERNATE(SERIAL_USART_TX_PAL_MODE) | PAL_STM32_OTYPE_OPENDRAIN);
|
||||
#endif
|
||||
}
|
||||
|
||||
void usart_master_init(void) {
|
||||
usart_init();
|
||||
|
||||
sdcfg.cr3 |= USART_CR3_HDSEL;
|
||||
sdStart(&SERIAL_USART_DRIVER, &sdcfg);
|
||||
}
|
||||
|
||||
void usart_slave_init(void) {
|
||||
usart_init();
|
||||
|
||||
sdcfg.cr3 |= USART_CR3_HDSEL;
|
||||
sdStart(&SERIAL_USART_DRIVER, &sdcfg);
|
||||
|
||||
// Start transport thread
|
||||
chThdCreateStatic(waSlaveThread, sizeof(waSlaveThread), HIGHPRIO, SlaveThread, NULL);
|
||||
}
|
||||
|
||||
static SSTD_t* Transaction_table = NULL;
|
||||
static uint8_t Transaction_table_size = 0;
|
||||
|
||||
void soft_serial_initiator_init(SSTD_t* sstd_table, int sstd_table_size) {
|
||||
Transaction_table = sstd_table;
|
||||
Transaction_table_size = (uint8_t)sstd_table_size;
|
||||
|
||||
usart_master_init();
|
||||
}
|
||||
|
||||
void soft_serial_target_init(SSTD_t* sstd_table, int sstd_table_size) {
|
||||
Transaction_table = sstd_table;
|
||||
Transaction_table_size = (uint8_t)sstd_table_size;
|
||||
|
||||
usart_slave_init();
|
||||
}
|
||||
|
||||
void handle_soft_serial_slave(void) {
|
||||
uint8_t sstd_index = sdGet(&SERIAL_USART_DRIVER); // first chunk is always transaction id
|
||||
SSTD_t* trans = &Transaction_table[sstd_index];
|
||||
|
||||
// Always write back the sstd_index as part of a basic handshake
|
||||
sstd_index ^= HANDSHAKE_MAGIC;
|
||||
sdWrite(&SERIAL_USART_DRIVER, &sstd_index, sizeof(sstd_index));
|
||||
|
||||
if (trans->initiator2target_buffer_size) {
|
||||
sdRead(&SERIAL_USART_DRIVER, trans->initiator2target_buffer, trans->initiator2target_buffer_size);
|
||||
}
|
||||
|
||||
if (trans->target2initiator_buffer_size) {
|
||||
sdWrite(&SERIAL_USART_DRIVER, trans->target2initiator_buffer, trans->target2initiator_buffer_size);
|
||||
}
|
||||
|
||||
if (trans->status) {
|
||||
*trans->status = TRANSACTION_ACCEPTED;
|
||||
}
|
||||
}
|
||||
|
||||
/////////
|
||||
// start transaction by initiator
|
||||
//
|
||||
// int soft_serial_transaction(int sstd_index)
|
||||
//
|
||||
// Returns:
|
||||
// TRANSACTION_END
|
||||
// TRANSACTION_NO_RESPONSE
|
||||
// TRANSACTION_DATA_ERROR
|
||||
#ifndef SERIAL_USE_MULTI_TRANSACTION
|
||||
int soft_serial_transaction(void) {
|
||||
uint8_t sstd_index = 0;
|
||||
#else
|
||||
int soft_serial_transaction(int index) {
|
||||
uint8_t sstd_index = index;
|
||||
#endif
|
||||
|
||||
if (sstd_index > Transaction_table_size) return TRANSACTION_TYPE_ERROR;
|
||||
SSTD_t* trans = &Transaction_table[sstd_index];
|
||||
msg_t res = 0;
|
||||
|
||||
sdClear(&SERIAL_USART_DRIVER);
|
||||
|
||||
// First chunk is always transaction id
|
||||
sdWriteTimeout(&SERIAL_USART_DRIVER, &sstd_index, sizeof(sstd_index), TIME_MS2I(TIMEOUT));
|
||||
|
||||
uint8_t sstd_index_shake = 0xFF;
|
||||
|
||||
// Which we always read back first so that we can error out correctly
|
||||
// - due to the half duplex limitations on return codes, we always have to read *something*
|
||||
// - without the read, write only transactions *always* succeed, even during the boot process where the slave is not ready
|
||||
res = sdReadTimeout(&SERIAL_USART_DRIVER, &sstd_index_shake, sizeof(sstd_index_shake), TIME_MS2I(TIMEOUT));
|
||||
if (res < 0 || (sstd_index_shake != (sstd_index ^ HANDSHAKE_MAGIC))) {
|
||||
dprintf("serial::usart_shake NO_RESPONSE\n");
|
||||
return TRANSACTION_NO_RESPONSE;
|
||||
}
|
||||
|
||||
if (trans->initiator2target_buffer_size) {
|
||||
res = sdWriteTimeout(&SERIAL_USART_DRIVER, trans->initiator2target_buffer, trans->initiator2target_buffer_size, TIME_MS2I(TIMEOUT));
|
||||
if (res < 0) {
|
||||
dprintf("serial::usart_transmit NO_RESPONSE\n");
|
||||
return TRANSACTION_NO_RESPONSE;
|
||||
}
|
||||
}
|
||||
|
||||
if (trans->target2initiator_buffer_size) {
|
||||
res = sdReadTimeout(&SERIAL_USART_DRIVER, trans->target2initiator_buffer, trans->target2initiator_buffer_size, TIME_MS2I(TIMEOUT));
|
||||
if (res < 0) {
|
||||
dprintf("serial::usart_receive NO_RESPONSE\n");
|
||||
return TRANSACTION_NO_RESPONSE;
|
||||
}
|
||||
}
|
||||
|
||||
return TRANSACTION_END;
|
||||
}
|
||||
@@ -37,8 +37,9 @@
|
||||
|
||||
// #define DEBUG_EEPROM_OUTPUT
|
||||
|
||||
#ifdef DEBUG_EEPROM_OUTPUT
|
||||
# include "print.h"
|
||||
#if defined(CONSOLE_ENABLE) && defined(DEBUG_EEPROM_OUTPUT)
|
||||
# include "timer.h"
|
||||
# include "debug.h"
|
||||
#endif // DEBUG_EEPROM_OUTPUT
|
||||
|
||||
static inline void init_i2c_if_required(void) {
|
||||
@@ -60,7 +61,7 @@ static inline void fill_target_address(uint8_t *buffer, const void *addr) {
|
||||
void eeprom_driver_init(void) {}
|
||||
|
||||
void eeprom_driver_erase(void) {
|
||||
#ifdef CONSOLE_ENABLE
|
||||
#if defined(CONSOLE_ENABLE) && defined(DEBUG_EEPROM_OUTPUT)
|
||||
uint32_t start = timer_read32();
|
||||
#endif
|
||||
|
||||
@@ -70,7 +71,7 @@ void eeprom_driver_erase(void) {
|
||||
eeprom_write_block(buf, (void *)(uintptr_t)addr, EXTERNAL_EEPROM_PAGE_SIZE);
|
||||
}
|
||||
|
||||
#ifdef CONSOLE_ENABLE
|
||||
#if defined(CONSOLE_ENABLE) && defined(DEBUG_EEPROM_OUTPUT)
|
||||
dprintf("EEPROM erase took %ldms to complete\n", ((long)(timer_read32() - start)));
|
||||
#endif
|
||||
}
|
||||
@@ -83,7 +84,7 @@ void eeprom_read_block(void *buf, const void *addr, size_t len) {
|
||||
i2c_transmit(EXTERNAL_EEPROM_I2C_ADDRESS((uintptr_t)addr), complete_packet, EXTERNAL_EEPROM_ADDRESS_SIZE, 100);
|
||||
i2c_receive(EXTERNAL_EEPROM_I2C_ADDRESS((uintptr_t)addr), buf, len, 100);
|
||||
|
||||
#ifdef DEBUG_EEPROM_OUTPUT
|
||||
#if defined(CONSOLE_ENABLE) && defined(DEBUG_EEPROM_OUTPUT)
|
||||
dprintf("[EEPROM R] 0x%04X: ", ((int)addr));
|
||||
for (size_t i = 0; i < len; ++i) {
|
||||
dprintf(" %02X", (int)(((uint8_t *)buf)[i]));
|
||||
@@ -110,7 +111,7 @@ void eeprom_write_block(const void *buf, void *addr, size_t len) {
|
||||
complete_packet[EXTERNAL_EEPROM_ADDRESS_SIZE + i] = read_buf[i];
|
||||
}
|
||||
|
||||
#ifdef DEBUG_EEPROM_OUTPUT
|
||||
#if defined(CONSOLE_ENABLE) && defined(DEBUG_EEPROM_OUTPUT)
|
||||
dprintf("[EEPROM W] 0x%04X: ", ((int)target_addr));
|
||||
for (uint8_t i = 0; i < write_length; i++) {
|
||||
dprintf(" %02X", (int)(read_buf[i]));
|
||||
|
||||
@@ -50,8 +50,9 @@
|
||||
# define EXTERNAL_EEPROM_SPI_TIMEOUT 100
|
||||
#endif
|
||||
|
||||
#ifdef CONSOLE_ENABLE
|
||||
# include "print.h"
|
||||
#if defined(CONSOLE_ENABLE) && defined(DEBUG_EEPROM_OUTPUT)
|
||||
# include "timer.h"
|
||||
# include "debug.h"
|
||||
#endif // CONSOLE_ENABLE
|
||||
|
||||
static void init_spi_if_required(void) {
|
||||
@@ -93,7 +94,7 @@ static void spi_eeprom_transmit_address(uintptr_t addr) {
|
||||
void eeprom_driver_init(void) {}
|
||||
|
||||
void eeprom_driver_erase(void) {
|
||||
#ifdef CONSOLE_ENABLE
|
||||
#if defined(CONSOLE_ENABLE) && defined(DEBUG_EEPROM_OUTPUT)
|
||||
uint32_t start = timer_read32();
|
||||
#endif
|
||||
|
||||
@@ -103,7 +104,7 @@ void eeprom_driver_erase(void) {
|
||||
eeprom_write_block(buf, (void *)(uintptr_t)addr, EXTERNAL_EEPROM_PAGE_SIZE);
|
||||
}
|
||||
|
||||
#ifdef CONSOLE_ENABLE
|
||||
#if defined(CONSOLE_ENABLE) && defined(DEBUG_EEPROM_OUTPUT)
|
||||
dprintf("EEPROM erase took %ldms to complete\n", ((long)(timer_read32() - start)));
|
||||
#endif
|
||||
}
|
||||
@@ -141,7 +142,7 @@ void eeprom_read_block(void *buf, const void *addr, size_t len) {
|
||||
spi_eeprom_transmit_address((uintptr_t)addr);
|
||||
spi_receive(buf, len);
|
||||
|
||||
#ifdef DEBUG_EEPROM_OUTPUT
|
||||
#if defined(CONSOLE_ENABLE) && defined(DEBUG_EEPROM_OUTPUT)
|
||||
dprintf("[EEPROM R] 0x%08lX: ", ((uint32_t)(uintptr_t)addr));
|
||||
for (size_t i = 0; i < len; ++i) {
|
||||
dprintf(" %02X", (int)(((uint8_t *)buf)[i]));
|
||||
@@ -200,7 +201,7 @@ void eeprom_write_block(const void *buf, void *addr, size_t len) {
|
||||
return;
|
||||
}
|
||||
|
||||
#ifdef DEBUG_EEPROM_OUTPUT
|
||||
#if defined(CONSOLE_ENABLE) && defined(DEBUG_EEPROM_OUTPUT)
|
||||
dprintf("[EEPROM W] 0x%08lX: ", ((uint32_t)(uintptr_t)target_addr));
|
||||
for (size_t i = 0; i < write_length; i++) {
|
||||
dprintf(" %02X", (int)(uint8_t)(read_buf[i]));
|
||||
|
||||
@@ -16,7 +16,8 @@
|
||||
|
||||
|
||||
/*
|
||||
* see jj40/stevexyz for more information
|
||||
* The 25% SuperMicro keyboard: a pure - full features - "Alpha 26" keymap on Gherkin, compatible also with 28 and 30 keys layouts
|
||||
* See https://github.com/stevexyz/qmk_firmware/blob/master/keyboards/40percentclub/gherkin/keymaps/stevexyz/readme.md for more information
|
||||
*/
|
||||
|
||||
|
||||
@@ -56,7 +57,7 @@ const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
* ,---------------------------------------------------------------------.
|
||||
* | | | | | | | | | | |
|
||||
* | Q | W | E | R | T | Y | U | I | O | P |
|
||||
* | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ |
|
||||
* | ____ | ____ | ____ | ____ | ____ | FnNav|NumSym| Alt | Ctrl | Shift|
|
||||
* |------+------+------+------+-------------+------+------+------+------|
|
||||
* | | | | | | | | | | |
|
||||
* | A | S | D | F | G | H | J | K | L | Enter|
|
||||
@@ -68,83 +69,73 @@ const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
* '-------------------------------------------------------'
|
||||
*/
|
||||
[LAYER_HOME] = LAYOUT_ortho_3x10(
|
||||
LT(LAYER_ARROWPAD, KC_Q), LT(LAYER_NUMPAD, KC_W), LT(LAYER_MEDIAPAD, KC_E), KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P,
|
||||
MT(MOD_LSFT, KC_A), LT(LAYER_FUNC, KC_S), LT(LAYER_NUMSYM, KC_D), MT(MOD_RALT, KC_F), MT(MOD_LGUI, KC_G), MT(MOD_RGUI, KC_H), MT(MOD_RALT, KC_J), LT(LAYER_FUNC, KC_K), LT(LAYER_NUMSYM, KC_L), MT(MOD_RSFT, KC_ENT),
|
||||
XXXXXXX, MT(MOD_LCTL, KC_Z), MT(MOD_LALT, KC_X), LT(LAYER_FUNC, KC_C), LT(LAYER_NUMSYM, KC_V), MT(MOD_LSFT, KC_B), MT(MOD_LALT, KC_N), MT(MOD_RCTL, KC_M), MT(MOD_RSFT, KC_SPC), XXXXXXX ),
|
||||
LT(LAYER_ARROWPAD, KC_Q), LT(LAYER_NUMPAD, KC_W), LT(LAYER_MEDIAPAD, KC_E), KC_R, KC_T, LT(LAYER_FUNC, KC_Y), LT(LAYER_NUMSYM, KC_U), MT(MOD_LALT, KC_I), MT(MOD_RCTL, KC_O), MT(MOD_RSFT, KC_P),
|
||||
MT(MOD_LSFT, KC_A), LT(LAYER_FUNC, KC_S), LT(LAYER_NUMSYM, KC_D), MT(MOD_RALT, KC_F), MT(MOD_LGUI, KC_G), MT(MOD_RGUI, KC_H), MT(MOD_RALT, KC_J), LT(LAYER_FUNC, KC_K), LT(LAYER_NUMSYM, KC_L), MT(MOD_RSFT, KC_ENT),
|
||||
KC_DOWN, MT(MOD_LCTL, KC_Z), MT(MOD_LALT, KC_X), LT(LAYER_FUNC, KC_C), LT(LAYER_NUMSYM, KC_V), MT(MOD_LSFT, KC_B), MT(MOD_LALT, KC_N), MT(MOD_RCTL, KC_M), MT(MOD_RSFT, KC_SPC), KC_BSPC
|
||||
),
|
||||
|
||||
/* Function and Navigation Layer
|
||||
* ,---------------------------------------------------------------------.
|
||||
* | | | | | | | | | | |
|
||||
* | F1 | F2 | F3 | F4 | F5 | F6 | F7 | F8 | F9 | F10 |
|
||||
* | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ |
|
||||
* | ____ | ____ | ____ | ____ | ____ | ____ |SysLay| Alt | Ctrl | Shift|
|
||||
* |------+------+------+------+-------------+------+------+------+------|
|
||||
* | | | | | | | | | | |
|
||||
* | ESC | Home | PgDn | PgUp | End | Left | Down | Up | Right| Baksp|
|
||||
* | ESC | Home | PgDn | PgUp | End | Left | Down | Up | Right|Backsp|
|
||||
* | Shift| ____ |SysLay| AltGr| OSkey| OSkey| AltGr| ____ |SysLay| Shift|
|
||||
* '------+------+------+------+------+------|------+------+------+------'
|
||||
* | | | | | | | | |
|
||||
* | ____ | ____ | | ____ | ____ | ____ | ____ | ____ |
|
||||
* | F11 | F12 | | Space|PrnScr|ScrLck|Pause |Backsp|
|
||||
* | Ctrl | Alt | ____ |SysLay| Shift| Alt | Ctrl | Shift|
|
||||
* '-------------------------------------------------------'
|
||||
*/
|
||||
[LAYER_FUNC] = LAYOUT_ortho_3x10(
|
||||
KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10,
|
||||
MT(MOD_LSFT, KC_ESC), KC_HOME, LT(LAYER_SYST, KC_PGDN), MT(MOD_RALT, KC_PGUP), MT(MOD_LGUI, KC_END), MT(MOD_RGUI, KC_LEFT), MT(MOD_RALT, KC_DOWN), KC_UP, LT(LAYER_SYST, KC_RGHT), MT(MOD_RSFT, KC_BSPC),
|
||||
XXXXXXX, KC_LCTL, KC_LALT, KC_NO, MO(LAYER_SYST), KC_LSFT, KC_LALT, KC_RCTL, MT(MOD_RSFT, KC_SPC), XXXXXXX ),
|
||||
KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_F6, LT(LAYER_SYST, KC_F7), MT(MOD_LALT, KC_F8), MT(MOD_RCTL,KC_F9), MT(MOD_RSFT, KC_F10),
|
||||
MT(MOD_LSFT, KC_ESC), KC_HOME, LT(LAYER_SYST, KC_PGDN), MT(MOD_RALT, KC_PGUP), MT(MOD_LGUI, KC_END), MT(MOD_RGUI, KC_LEFT), MT(MOD_RALT, KC_DOWN), KC_UP, LT(LAYER_SYST, KC_RGHT), MT(MOD_RSFT, KC_BSPC),
|
||||
KC_DOWN, MT(KC_LCTL, KC_F11), MT(KC_LALT, KC_F12), KC_NO, LT(LAYER_SYST, KC_SPACE), MT(KC_LSFT, KC_PSCR), MT(KC_LALT, KC_SLCK), MT(KC_RCTL, KC_PAUS), MT(MOD_RSFT, KC_BSPC), KC_UP
|
||||
),
|
||||
|
||||
/* Number and Symbols Layer
|
||||
* ,---------------------------------------------------------------------.
|
||||
* | ! | @ | # | $ | % | ^ | & | * | ( | ) |
|
||||
* | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 |
|
||||
* | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ |
|
||||
* | ____ | ____ | ____ | ____ | ____ |SysLay| ____ | Alt | Ctrl | Shift|
|
||||
* |------+------+------+------+-------------+------+------+------+------|
|
||||
* | | ~ | _ | + | { | } | | | : | " | |
|
||||
* | TAB | ` | - | = | [ | ] | \ | ; | ' | Del |
|
||||
* | Shift|SysLay| ____ | AltGr| OSkey| OSkey| AltGr|SysLay| ____ | Shift|
|
||||
* ' -----+------+------+------+------+------|------+------+------+------'
|
||||
* | | | | | < | > | ? | |
|
||||
* | ____ | ____ | ____ | | , | . | / | ____ |
|
||||
* |BackSp| Del | Enter| | , | . | / | Enter|
|
||||
* | Ctrl | Alt |SysLay| ____ | Shift| Alt | Ctrl | Shift|
|
||||
* '-------------------------------------------------------'
|
||||
*/
|
||||
[LAYER_NUMSYM] = LAYOUT_ortho_3x10(
|
||||
KC_1, KC_2, KC_3, KC_4, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0,
|
||||
MT(MOD_LSFT, KC_TAB), LT(LAYER_SYST, KC_GRV), KC_MINS, MT(MOD_RALT, KC_EQL), MT(MOD_LGUI, KC_LBRC), MT(MOD_RGUI, KC_RBRC), MT(MOD_RALT, KC_BSLS), LT(LAYER_SYST, KC_SCLN), KC_QUOT, MT(MOD_RSFT, KC_DEL),
|
||||
XXXXXXX, KC_LCTL, KC_LALT, MO(LAYER_SYST), KC_NO, MT(MOD_LSFT, KC_COMM), MT(MOD_LALT, KC_DOT), MT(MOD_RCTL, KC_SLSH), MT(MOD_RSFT, KC_SPC), XXXXXXX ),
|
||||
KC_1, KC_2, KC_3, KC_4, KC_5, LT(LAYER_SYST, KC_6), KC_7, MT(MOD_LALT, KC_8), MT(MOD_RCTL,KC_9), MT(MOD_RSFT, KC_0),
|
||||
MT(MOD_LSFT, KC_TAB), LT(LAYER_SYST, KC_GRV), KC_MINS, MT(MOD_RALT, KC_EQL), MT(MOD_LGUI, KC_LBRC), MT(MOD_RGUI, KC_RBRC), MT(MOD_RALT, KC_BSLS), LT(LAYER_SYST, KC_SCLN), KC_QUOT, MT(MOD_RSFT, KC_DEL),
|
||||
KC_LEFT, MT(KC_LCTL, KC_BSPC), MT(KC_LALT, KC_DEL), LT(LAYER_SYST, KC_ENT), KC_NO, MT(MOD_LSFT, KC_COMM), MT(MOD_LALT, KC_DOT), MT(MOD_RCTL, KC_SLSH), MT(MOD_RSFT, KC_ENT), KC_RGHT
|
||||
),
|
||||
|
||||
/* System Layer
|
||||
* ,---------------------------------------------------------------------.
|
||||
* | | | | | | | | | | |
|
||||
* | F11 | F12 | Play | Next |MsWhlU|MsBtn1|OSMenu|SysReq|MsBtn2|Backsp|
|
||||
* | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ |
|
||||
* | Play | Stop | Prev | Next |MsBtn1|MsLeft|MSDown| MsUp |MsRigh|MsBtn2|
|
||||
* | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | Shift|
|
||||
* |------+------+------+------+-------------+------+------+------+------|
|
||||
* | | | | | | | | | | |
|
||||
* | Caps | Mute | Vol- | Vol+ |MsWhlD|MsLeft|MSDown| MsUp |MsRigh| Ins |
|
||||
* | Shift| ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | Shift|
|
||||
* |Backsp| Mute | Vol- | Vol+ |MsWhlD| Left | Down | Up | Right|Backsp|
|
||||
* | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ |
|
||||
* '------+------+------+------+------+------|------+------+------+------'
|
||||
* | | | | | | | | |
|
||||
* | ____ | ____ | | |PrnScr|ScrLck|Pause | ____ |
|
||||
* | Ctrl | Alt | ____ | ____ | ____ | ____ | ____ | Shift|
|
||||
* '-------------------------------------------------------'
|
||||
* simplified view (for media and mouse there are dedicated layers)
|
||||
* ,---------------------------------------------------------------------.
|
||||
* | | | | | | | | | | |
|
||||
* | F11 | F12 | | | | |OSMenu|SysReq| |Backsp|
|
||||
* | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ |
|
||||
* |------+------+------+------+-------------+------+------+------+------|
|
||||
* | | | | | | | | | | |
|
||||
* | Caps | | | | | | | | | Ins |
|
||||
* | Shift| ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | Shift|
|
||||
* '------+------+------+------+------+------|------+------+------+------+
|
||||
* | | | | | | | | |
|
||||
* | | | | |PrnScr|ScrLck|Pause | |
|
||||
* | Ctrl | Alt | ____ | ____ | ____ | ____ | ____ | Shift|
|
||||
* | ____ | ____ | Enter| Space| Mute | Vol- | Vol+ | Space|
|
||||
* | Ctrl | Alt | ____ | ____ | Shift| Alt | Ctrl | ____ |
|
||||
* '-------------------------------------------------------'
|
||||
*/
|
||||
[LAYER_SYST] = LAYOUT_ortho_3x10(
|
||||
KC_F11, KC_F12, KC_MPLY, KC_MNXT, KC_MS_WH_UP, KC_MS_BTN1, KC_APP, KC_SYSREQ, KC_MS_BTN2, KC_BSPC,
|
||||
MT(MOD_LSFT, KC_CAPS), KC_MUTE, KC_VOLD, KC_VOLU, KC_MS_WH_DOWN, KC_MS_LEFT, KC_MS_DOWN, KC_MS_UP, KC_MS_RIGHT, MT(MOD_RSFT, KC_INS),
|
||||
XXXXXXX, KC_LCTL, KC_LALT, KC_NO, KC_NO, KC_PSCR, KC_SLCK, KC_PAUS, MT(MOD_RSFT, KC_SPC), XXXXXXX ),
|
||||
KC_MPLY, KC_STOP, KC_MPRV, KC_MNXT, KC_MS_BTN1, KC_MS_LEFT, KC_MS_DOWN, KC_MS_UP, KC_MS_RIGHT, MT(MOD_RSFT, KC_MS_BTN2),
|
||||
KC_BSPC, KC_DEL, KC_PGDN, KC_PGUP, KC_APP, KC_LEFT, KC_DOWN, KC_UP, KC_RGHT, KC_BSPC,
|
||||
KC_PGDN, MT(KC_LCTL, KC_CAPS), MT(KC_LALT, KC_INS), KC_ENT, KC_SPC, MT(MOD_RSFT, KC_MUTE), MT(MOD_LALT, KC_VOLD), MT(MOD_RCTL, KC_VOLU), KC_SPC, KC_PGUP
|
||||
),
|
||||
|
||||
/* ArrowPad (mod su Q) /------mouse-------\ /-----cursor-------\
|
||||
* ,---------------------------------------------------------------------.
|
||||
@@ -157,23 +148,24 @@ const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
* | Shift| ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ |
|
||||
* '------+------+------+------+------+------|------+------+------+------'
|
||||
* | | | | | | | | |
|
||||
* | | |MsWhlU|MsDown|MsWhlD| End | Down | PdDn |
|
||||
* | | |MsWhlU|MsDown|MsWhlD| End | PgDn | PgDn |
|
||||
* | Ctrl | Alt | ____ | ____ | ____ | ____ | ____ | ____ |
|
||||
* '-------------------------------------------------------'
|
||||
*/
|
||||
[LAYER_ARROWPAD] = LAYOUT_ortho_3x10(
|
||||
KC_NO, KC_NO, KC_NO, KC_MS_BTN1, KC_MS_UP, KC_MS_BTN2, KC_HOME, KC_UP, KC_PGUP, KC_BSPC,
|
||||
KC_LSFT, KC_NO, KC_NO, KC_MS_LEFT, KC_MS_DOWN, KC_MS_RIGHT, KC_LEFT, KC_DOWN, KC_RIGHT, KC_ENT,
|
||||
XXXXXXX, KC_LCTL, KC_LALT, KC_MS_WH_UP, KC_MS_DOWN, KC_MS_WH_DOWN, KC_END, KC_DOWN, KC_PGDN, XXXXXXX ),
|
||||
KC_NO, KC_NO, KC_NO, KC_MS_BTN1, KC_MS_UP, KC_MS_BTN2, KC_HOME, KC_UP, KC_PGUP, KC_BSPC,
|
||||
KC_LSFT, KC_NO, KC_NO, KC_MS_LEFT, KC_MS_DOWN, KC_MS_RIGHT, KC_LEFT, KC_DOWN, KC_RIGHT, KC_ENT,
|
||||
XXXXXXX, KC_LCTL, KC_LALT, KC_MS_WH_UP, KC_MS_DOWN, KC_MS_WH_DOWN, KC_END, KC_PGDN, KC_PGDN, XXXXXXX
|
||||
),
|
||||
|
||||
/* NumPad (mod su W)
|
||||
* ,---------------------------------------------------------------------.
|
||||
* | | | | | | | | | | |
|
||||
* | | | / | * | - |Backsp| 7 | 8 | 9 | 0 |
|
||||
* | | | 3 | * | - |Backsp| 7 | 8 | 9 | 0 |
|
||||
* | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ |
|
||||
* |------+------+------+------+-------------+------+------+------+------|
|
||||
* | | | | | | | | | | |
|
||||
* | | | | = | + | . | 4 | 5 | 6 | Enter|
|
||||
* | | | / | = | + | . | 4 | 5 | 6 | Enter|
|
||||
* | Shift| ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ | ____ |
|
||||
* '------+------+------+------+------+------|------+------+------+------'
|
||||
* | | | | | | | | |
|
||||
@@ -182,9 +174,10 @@ const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
* '-------------------------------------------------------'
|
||||
*/
|
||||
[LAYER_NUMPAD] = LAYOUT_ortho_3x10(
|
||||
KC_NO, KC_NO, KC_KP_SLASH, KC_KP_ASTERISK, KC_KP_MINUS, KC_BSPC, KC_7, KC_8, KC_9, KC_0,
|
||||
KC_LSFT, KC_NO, KC_NO, KC_KP_EQUAL, KC_KP_PLUS, KC_DOT, KC_4, KC_5, KC_6, KC_ENT,
|
||||
XXXXXXX, KC_LCTL, KC_LALT, KC_NO, KC_TAB, KC_COMM, KC_1, KC_2, KC_3, XXXXXXX ),
|
||||
KC_NO, KC_NO, KC_3, KC_KP_ASTERISK, KC_KP_MINUS, KC_BSPC, KC_7, KC_8, KC_9, KC_0,
|
||||
KC_LSFT, KC_NO, KC_KP_SLASH, KC_KP_EQUAL, KC_KP_PLUS, KC_DOT, KC_4, KC_5, KC_6, KC_ENT,
|
||||
XXXXXXX, KC_LCTL, KC_LALT, KC_NO, KC_TAB, KC_COMM, KC_1, KC_2, KC_3, XXXXXXX
|
||||
),
|
||||
|
||||
/* MediaPad (mod su E)
|
||||
* ,---------------------------------------------------------------------.
|
||||
@@ -202,9 +195,10 @@ const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
* '-------------------------------------------------------'
|
||||
*/
|
||||
[LAYER_MEDIAPAD] = LAYOUT_ortho_3x10(
|
||||
KC_NO, KC_NO, KC_NO, KC_NO, KC_NO, KC_NO, KC_NO, KC_VOLU, KC_NO, KC_NO,
|
||||
KC_LSFT, KC_NO, KC_NO, KC_NO, KC_NO, KC_NO, KC_MPRV, KC_MPLY, KC_MNXT, KC_NO,
|
||||
XXXXXXX, KC_LCTL, KC_LALT, KC_NO, KC_NO, KC_NO, KC_MUTE, KC_VOLD, KC_NO, XXXXXXX ),
|
||||
KC_NO, KC_NO, KC_NO, KC_NO, KC_NO, KC_NO, KC_NO, KC_VOLU, KC_NO, KC_NO,
|
||||
KC_LSFT, KC_NO, KC_NO, KC_NO, KC_NO, KC_NO, KC_MPRV, KC_MPLY, KC_MNXT, KC_NO,
|
||||
XXXXXXX, KC_LCTL, KC_LALT, KC_NO, KC_NO, KC_NO, KC_MUTE, KC_VOLD, KC_NO, XXXXXXX
|
||||
),
|
||||
|
||||
};
|
||||
|
||||
@@ -225,15 +219,13 @@ bool process_record_user(uint16_t keycode, keyrecord_t *record) {
|
||||
case CK_TRIPLEZERO:
|
||||
if (record->event.pressed) {
|
||||
SEND_STRING("000");
|
||||
} // else { when released... }
|
||||
} // else { when released }
|
||||
break;
|
||||
}
|
||||
return true;
|
||||
};
|
||||
|
||||
void keyboard_pre_init_user(void) {
|
||||
// Call the keyboard pre init code.
|
||||
|
||||
// Set our LED pins as output
|
||||
setPinOutput(D5);
|
||||
setPinOutput(B0);
|
||||
|
||||
@@ -1,11 +1,15 @@
|
||||
# gherkin super micro edition
|
||||
# The 25% SuperMicro keyboard
|
||||
## A full featured keymap on Gherkin compatible with a pure "Alpha 26" layout
|
||||
|
||||
With this configuration the "28" layout first experimented on the plank-like jj40 is being ported to a more proper board, leaving just two keys not used.
|
||||
With this configuration the "SuperMicro" layout first experimented on the plank-like jj40 is being ported to a more proper board, and with the last changes, this layout has been made compatible also to a "26 keys" one. So you can now choose to leave all 30 keys on the keyboard, or remove the two on the bottom line corners to have the "old" and comfortable 28 keys layout, or remove also space and enter to have the simplest "pure alpha" one! And even the intermediate 27 keys one is an interesting compatible option!
|
||||
|
||||
For more information please have a look at https://github.com/stevexyz/qmk_firmware/blob/master/keyboards/jj40/keymaps/stevexyz/readme.md
|
||||
This keymap is for a generic usage, trying to avoid as much gimmick as possible (considering the number of keys) and retain muscle memory from people used to the standard Qwerty 104 keys one. Functions and numbers (with related symbols) are on the first row as expected; other examples of design coherency include the symbols on the central row laid out in the same order as you'll find on a standard full keyboard, and the cursor movement aligned to the common unix vi standard ("hjkl", and for symmetry "sdfg" for home/pgdn/pgup/end). I've personally used this layout for months on my home PC in parallel to my portable work PC.
|
||||
|
||||
The image below explain the main layers. In addition to them with q, w and e there are three specific dedicated layers for cursors/mouse, numpad and media.
|
||||
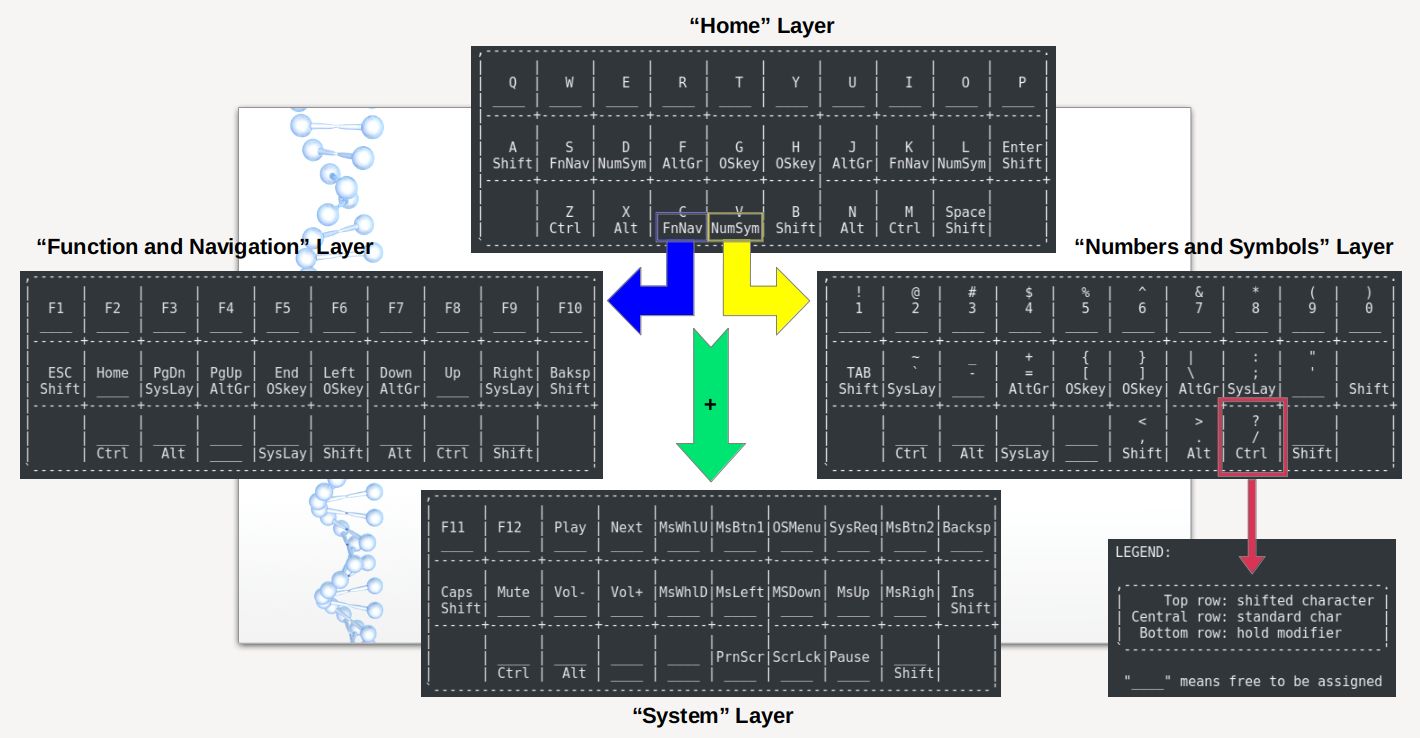
|
||||
Relying just on the alphabetic keys this layout can be also very easily ported and tested on any qmk supported keyboard (ok, butterstick excluded).
|
||||
|
||||
The image below explains the main layers activated respectively with F, N or both modifiers pressed together. In addition to them there are available 5 layers that can be personalized as needed or completely removed without losing any functionality; three of them are currently setup in the default keymap for cursors/mouse, numpad and media (activated with q, w and e respectively).
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
|
||||
@@ -4,7 +4,7 @@ An open source 2x4 macropad designed by Charles Garcia.
|
||||
|
||||
Keyboard Maintainer: [Charles Garcia](https://github.com/cgarcia2097)
|
||||
Hardware Supported: 8-Pack Macropad PCB
|
||||
Hardware Availability: [8-Pack Github](https://github.com/cgarcia2097/8-Pack)
|
||||
Hardware Availability: [8-Pack GitHub](https://github.com/cgarcia2097/8-Pack)
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
|
||||
@@ -6,7 +6,7 @@ A first attempt at a PCB design for a mechanical keyboard. Includes rotary encod
|
||||
|
||||
* Keyboard Maintainer: [nickolaij](https://github.com/nickolaij)
|
||||
* Hardware Supported: Abacus PCB, [Elite C Microcontroller](https://keeb.io/products/elite-c-usb-c-pro-micro-replacement-arduino-compatible-atmega32u4) or Pro Micro Microcontroller (Elite C has additional pins for encoder)
|
||||
* Hardware Availability: [Abacus PCB Github](https://github.com/nickolaij/Abacus_Rev2)
|
||||
* Hardware Availability: [Abacus PCB GitHub](https://github.com/nickolaij/Abacus_Rev2)
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
|
||||
@@ -4,7 +4,7 @@
|
||||
|
||||
A custom luxurious 60 with F-row and Macro
|
||||
|
||||
* Keyboard Maintainer: [Yiancar](http://yiancar-designs.com/) and on [github](https://github.com/yiancar)
|
||||
* Keyboard Maintainer: [Yiancar](http://yiancar-designs.com/) and on [GitHub](https://github.com/yiancar)
|
||||
* Hardware Supported: ATmega32U4
|
||||
* Hardware Availability: Small production run by mrpetrov#9585 and [protoTypist](https://discord.gg/UvskpBB)
|
||||
|
||||
|
||||
@@ -4,7 +4,7 @@
|
||||
|
||||
A custom luxurious numpad to match Allison
|
||||
|
||||
* Keyboard Maintainer: [Yiancar](http://yiancar-designs.com/) and on [github](https://github.com/yiancar)
|
||||
* Keyboard Maintainer: [Yiancar](http://yiancar-designs.com/) and on [GitHub](https://github.com/yiancar)
|
||||
* Hardware Supported: ATmega32U4
|
||||
* Hardware Availability: Small production run by mrpetrov#9585 and [protoTypist](https://discord.gg/UvskpBB)
|
||||
|
||||
|
||||
@@ -6,7 +6,7 @@ Keyboard Maintainer: QMK Community
|
||||
Hardware Supported: Alps64 PCB
|
||||
Hardware Availability: https://geekhack.org/index.php?topic=69666.0
|
||||
|
||||
QMK is not the Alps64 official firmware. To use the official tools, refer to [TMK Keymap Editor](http://www.tmk-kbd.com/tmk_keyboard/editor/unimap/?alps64) or [TMK Keyboard Firmware on Github](https://github.com/tmk/tmk_keyboard).
|
||||
QMK is not the Alps64 official firmware. To use the official tools, refer to [TMK Keymap Editor](http://www.tmk-kbd.com/tmk_keyboard/editor/unimap/?alps64) or [TMK Keyboard Firmware on GitHub](https://github.com/tmk/tmk_keyboard).
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
|
||||
56
keyboards/aos/tkl/config.h
Normal file
56
keyboards/aos/tkl/config.h
Normal file
@@ -0,0 +1,56 @@
|
||||
/*
|
||||
Copyright 2020 aholland909
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#pragma once
|
||||
|
||||
#include "config_common.h"
|
||||
|
||||
/* USB Device descriptor parameter */
|
||||
#define VENDOR_ID 0x504B
|
||||
#define PRODUCT_ID 0x1000
|
||||
#define DEVICE_VER 0x0001
|
||||
#define MANUFACTURER Ace of Spades
|
||||
#define PRODUCT Ace of Spades TKL
|
||||
#define DESCRIPTION Ace of Spades TKL
|
||||
|
||||
/* key matrix size */
|
||||
#define MATRIX_ROWS 6
|
||||
#define MATRIX_COLS 17
|
||||
|
||||
#define MATRIX_ROW_PINS { D3, D2, B7, F1, C7, D5 }
|
||||
#define MATRIX_COL_PINS { B0, B1, B2, B3, F4, F5, F6, F7, B6, B5, D7, B4, D6, F0, D1, C6, D4 }
|
||||
#define UNUSED_PINS
|
||||
|
||||
/* COL2ROW, ROW2COL */
|
||||
#define DIODE_DIRECTION COL2ROW
|
||||
|
||||
/* Debounce reduces chatter (unintended double-presses) - set 0 if debouncing is not needed */
|
||||
#define DEBOUNCE 5
|
||||
|
||||
#define LOCKING_SUPPORT_ENABLE
|
||||
/* Locking resynchronize hack */
|
||||
#define LOCKING_RESYNC_ENABLE
|
||||
|
||||
|
||||
#define RGB_DI_PIN E6
|
||||
#ifdef RGB_DI_PIN
|
||||
#define RGBLIGHT_ANIMATIONS
|
||||
#define RGBLED_NUM 88
|
||||
#define RGBLIGHT_HUE_STEP 8
|
||||
#define RGBLIGHT_SAT_STEP 8
|
||||
#define RGBLIGHT_VAL_STEP 8
|
||||
#endif
|
||||
98
keyboards/aos/tkl/info.json
Normal file
98
keyboards/aos/tkl/info.json
Normal file
@@ -0,0 +1,98 @@
|
||||
{
|
||||
"keyboard_name": "Ace of Spades TKL",
|
||||
"maintainer": "rys",
|
||||
"width": 18.25,
|
||||
"height": 6.5,
|
||||
"layouts": {
|
||||
"LAYOUT_tkl_iso_wkl": {
|
||||
"key_count": 85,
|
||||
"layout": [
|
||||
{"label":"Esc", "x":0, "y":0},
|
||||
{"label":"F1", "x":2, "y":0},
|
||||
{"label":"F2", "x":3, "y":0},
|
||||
{"label":"F3", "x":4, "y":0},
|
||||
{"label":"F4", "x":5, "y":0},
|
||||
{"label":"F5", "x":6.5, "y":0},
|
||||
{"label":"F6", "x":7.5, "y":0},
|
||||
{"label":"F7", "x":8.5, "y":0},
|
||||
{"label":"F8", "x":9.5, "y":0},
|
||||
{"label":"F9", "x":11, "y":0},
|
||||
{"label":"F10", "x":12, "y":0},
|
||||
{"label":"F11", "x":13, "y":0},
|
||||
{"label":"F12", "x":14, "y":0},
|
||||
{"label":"PrtSc", "x":15.25, "y":0},
|
||||
{"label":"Scroll Lock", "x":16.25, "y":0},
|
||||
{"label":"Pause", "x":17.25, "y":0},
|
||||
{"label":"\u00ac", "x":0, "y":1.5},
|
||||
{"label":"!", "x":1, "y":1.5},
|
||||
{"label":"\"", "x":2, "y":1.5},
|
||||
{"label":"£", "x":3, "y":1.5},
|
||||
{"label":"$", "x":4, "y":1.5},
|
||||
{"label":"%", "x":5, "y":1.5},
|
||||
{"label":"^", "x":6, "y":1.5},
|
||||
{"label":"&", "x":7, "y":1.5},
|
||||
{"label":"*", "x":8, "y":1.5},
|
||||
{"label":"(", "x":9, "y":1.5},
|
||||
{"label":")", "x":10, "y":1.5},
|
||||
{"label":"_", "x":11, "y":1.5},
|
||||
{"label":"+", "x":12, "y":1.5},
|
||||
{"label":"Backspace", "x":13, "y":1.5, "w":2},
|
||||
{"label":"Insert", "x":15.25, "y":1.5},
|
||||
{"label":"Home", "x":16.25, "y":1.5},
|
||||
{"label":"PgUp", "x":17.25, "y":1.5},
|
||||
{"label":"Tab", "x":0, "y":2.5, "w":1.5},
|
||||
{"label":"Q", "x":1.5, "y":2.5},
|
||||
{"label":"W", "x":2.5, "y":2.5},
|
||||
{"label":"E", "x":3.5, "y":2.5},
|
||||
{"label":"R", "x":4.5, "y":2.5},
|
||||
{"label":"T", "x":5.5, "y":2.5},
|
||||
{"label":"Y", "x":6.5, "y":2.5},
|
||||
{"label":"U", "x":7.5, "y":2.5},
|
||||
{"label":"I", "x":8.5, "y":2.5},
|
||||
{"label":"O", "x":9.5, "y":2.5},
|
||||
{"label":"P", "x":10.5, "y":2.5},
|
||||
{"label":"{", "x":11.5, "y":2.5},
|
||||
{"label":"}", "x":12.5, "y":2.5},
|
||||
{"label":"Delete", "x":15.25, "y":2.5},
|
||||
{"label":"End", "x":16.25, "y":2.5},
|
||||
{"label":"PgDn", "x":17.25, "y":2.5},
|
||||
{"label":"Caps Lock", "x":0, "y":3.5, "w":1.75},
|
||||
{"label":"A", "x":1.75, "y":3.5},
|
||||
{"label":"S", "x":2.75, "y":3.5},
|
||||
{"label":"D", "x":3.75, "y":3.5},
|
||||
{"label":"F", "x":4.75, "y":3.5},
|
||||
{"label":"G", "x":5.75, "y":3.5},
|
||||
{"label":"H", "x":6.75, "y":3.5},
|
||||
{"label":"J", "x":7.75, "y":3.5},
|
||||
{"label":"K", "x":8.75, "y":3.5},
|
||||
{"label":"L", "x":9.75, "y":3.5},
|
||||
{"label":":", "x":10.75, "y":3.5},
|
||||
{"label":"@", "x":11.75, "y":3.5},
|
||||
{"label":"~", "x":12.75, "y":3.5},
|
||||
{"label":"Enter", "x":13.75, "y":2.5, "w":1.25, "h":2},
|
||||
{"label":"Shift", "x":0, "y":4.5, "w":1.25},
|
||||
{"label":"|", "x":1.25, "y":4.5},
|
||||
{"label":"Z", "x":2.25, "y":4.5},
|
||||
{"label":"X", "x":3.25, "y":4.5},
|
||||
{"label":"C", "x":4.25, "y":4.5},
|
||||
{"label":"V", "x":5.25, "y":4.5},
|
||||
{"label":"B", "x":6.25, "y":4.5},
|
||||
{"label":"N", "x":7.25, "y":4.5},
|
||||
{"label":"M", "x":8.25, "y":4.5},
|
||||
{"label":"<", "x":9.25, "y":4.5},
|
||||
{"label":">", "x":10.25, "y":4.5},
|
||||
{"label":"?", "x":11.25, "y":4.5},
|
||||
{"label":"Shift", "x":12.25, "y":4.5, "w":2.75},
|
||||
{"label":"Up", "x":16.25, "y":4.5},
|
||||
{"label":"Ctrl", "x":0, "y":5.5, "w":1.5},
|
||||
{"label":"Alt", "x":2.5, "y":5.5, "w":1.5},
|
||||
{"label":"Space", "x":4, "y":5.5, "w":7},
|
||||
{"label":"AltGr", "x":11, "y":5.5, "w":1.5},
|
||||
{"label":"Ctrl", "x":13.5, "y":5.5, "w":1.5},
|
||||
{"label":"Left", "x":15.25, "y":5.5},
|
||||
{"label":"Down", "x":16.25, "y":5.5},
|
||||
{"label":"Right", "x":17.25, "y":5.5}
|
||||
]
|
||||
}
|
||||
}
|
||||
}
|
||||
38
keyboards/aos/tkl/keymaps/aholland909/keymap.c
Normal file
38
keyboards/aos/tkl/keymaps/aholland909/keymap.c
Normal file
@@ -0,0 +1,38 @@
|
||||
/*
|
||||
Copyright 2020 aholland909
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[0] = LAYOUT_tkl_iso_wkl(
|
||||
KC_GESC, KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11, KC_F12, KC_PSCR, KC_SLCK, KC_PAUSE,
|
||||
|
||||
KC_GRV, KC_1, KC_2, KC_3, KC_4, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0, KC_MINS, KC_EQL, KC_BSPC, KC_INS, KC_HOME, KC_PGUP,
|
||||
KC_TAB, KC_Q, KC_W, KC_E, KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P, KC_LBRC, KC_RBRC, KC_DEL, KC_END, KC_PGDN,
|
||||
LT(1,KC_CAPS), KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, KC_QUOT, KC_NUHS, KC_ENT,
|
||||
KC_LSFT, KC_NUBS, KC_Z, KC_X, KC_C, KC_V, KC_B, KC_N, KC_M, KC_COMM, KC_DOT, KC_SLSH, KC_RSFT, KC_UP,
|
||||
KC_LCTL, KC_LALT, KC_SPC, KC_RGUI, TG(1), KC_LEFT, KC_DOWN, KC_RGHT),
|
||||
|
||||
[1] = LAYOUT_tkl_iso_wkl(
|
||||
RESET, KC_F13, KC_F14, KC_F15, KC_F16, KC_F17, KC_F18, KC_F19, KC_F20, KC_F21, KC_F22, KC_F23, KC_F24, _______, _______, _______,
|
||||
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, KC_VOLU, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, RGB_M_P, RGB_M_B, _______,
|
||||
_______, KC_MPRV, KC_VOLD, KC_MNXT, _______, _______, KC_LEFT, KC_DOWN, KC_UP, KC_RGHT, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, KC_CALC, _______, _______, _______, _______, _______, _______, _______, _______, RGB_HUI,
|
||||
_______, _______, KC_MPLY, _______, _______, RGB_SAD, RGB_HUD, RGB_VAI),
|
||||
};
|
||||
38
keyboards/aos/tkl/keymaps/default/keymap.c
Normal file
38
keyboards/aos/tkl/keymaps/default/keymap.c
Normal file
@@ -0,0 +1,38 @@
|
||||
/*
|
||||
Copyright 2020 aholland909
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[0] = LAYOUT_tkl_iso_wkl(
|
||||
KC_ESC, KC_F1, KC_F1, KC_F3, KC_F4, KC_F5, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11, KC_F12, KC_PSCR, KC_SLCK, KC_PAUS,
|
||||
|
||||
KC_GRV, KC_1, KC_2, KC_3, KC_4, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0, KC_MINS, KC_EQL, KC_BSPC, KC_INS, KC_HOME, KC_PGUP,
|
||||
KC_TAB, KC_Q, KC_W, KC_E, KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P, KC_LBRC, KC_RBRC, KC_DEL, KC_END, KC_PGDN,
|
||||
KC_CAPS, KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, KC_QUOT, KC_NUHS, KC_ENT,
|
||||
KC_LSFT, KC_NUBS, KC_Z, KC_X, KC_C, KC_V, KC_B, KC_N, KC_M, KC_COMM, KC_DOT, KC_SLSH, KC_RSFT, KC_UP,
|
||||
KC_LCTL, KC_LALT, KC_SPC, KC_RGUI, MO(1), KC_LEFT, KC_DOWN, KC_RGHT
|
||||
),
|
||||
[1] = LAYOUT_tkl_iso_wkl(
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, RESET, _______, _______, _______, _______, _______, _______, _______, _______, RGB_M_P, RGB_M_B, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, RGB_HUI,
|
||||
_______, _______, _______, _______, _______, RGB_SAD, RGB_HUD, RGB_VAI
|
||||
),
|
||||
};
|
||||
3
keyboards/aos/tkl/keymaps/default/readme.md
Normal file
3
keyboards/aos/tkl/keymaps/default/readme.md
Normal file
@@ -0,0 +1,3 @@
|
||||
# The default keymap for Ace of Spades
|
||||
|
||||
The Ace of Spades is a fixed ISO TKL with blocked winkeyless bottom row.
|
||||
55
keyboards/aos/tkl/keymaps/via/keymap.c
Normal file
55
keyboards/aos/tkl/keymaps/via/keymap.c
Normal file
@@ -0,0 +1,55 @@
|
||||
/* Copyright 2020 Rys Sommefeldt
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[0] = LAYOUT_tkl_iso_wkl(
|
||||
KC_ESC, KC_F1, KC_F1, KC_F3, KC_F4, KC_F5, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11, KC_F12, KC_PSCR, KC_SLCK, KC_PAUS,
|
||||
|
||||
KC_GRV, KC_1, KC_2, KC_3, KC_4, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0, KC_MINS, KC_EQL, KC_BSPC, KC_INS, KC_HOME, KC_PGUP,
|
||||
KC_TAB, KC_Q, KC_W, KC_E, KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P, KC_LBRC, KC_RBRC, KC_DEL, KC_END, KC_PGDN,
|
||||
KC_CAPS, KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, KC_QUOT, KC_NUHS, KC_ENT,
|
||||
KC_LSFT, KC_NUBS, KC_Z, KC_X, KC_C, KC_V, KC_B, KC_N, KC_M, KC_COMM, KC_DOT, KC_SLSH, KC_RSFT, KC_UP,
|
||||
KC_LCTL, KC_LALT, KC_SPC, KC_RGUI, MO(1), KC_LEFT, KC_DOWN, KC_RGHT
|
||||
),
|
||||
[1] = LAYOUT_tkl_iso_wkl(
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, RESET, _______, _______, _______, _______, _______, _______, _______, _______, RGB_M_P, RGB_M_B, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, RGB_HUI,
|
||||
_______, _______, _______, _______, _______, RGB_SAD, RGB_HUD, RGB_VAI
|
||||
),
|
||||
[2] = LAYOUT_tkl_iso_wkl(
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______
|
||||
),
|
||||
[3] = LAYOUT_tkl_iso_wkl(
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______, _______
|
||||
),
|
||||
};
|
||||
2
keyboards/aos/tkl/keymaps/via/rules.mk
Normal file
2
keyboards/aos/tkl/keymaps/via/rules.mk
Normal file
@@ -0,0 +1,2 @@
|
||||
VIA_ENABLE = yes
|
||||
MOUSEKEY_ENABLE = no
|
||||
13
keyboards/aos/tkl/readme.md
Normal file
13
keyboards/aos/tkl/readme.md
Normal file
@@ -0,0 +1,13 @@
|
||||
# Ace of Spades TKL
|
||||
|
||||
The TKL is a custom limited run keyboard designed by Ace of Spades and manufactured by Salvun.
|
||||
|
||||
* Keyboard Maintainers: [aholland909](https://github.com/aholland909), [rys](https://github.com/rys)
|
||||
* Hardware Supported: Ace of Spades custom TKL PCB by [aholland909](https://github.com/aholland909)
|
||||
* Hardware Availability: Custom group buy
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
make aos/tkl:default
|
||||
|
||||
See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs).
|
||||
32
keyboards/aos/tkl/rules.mk
Normal file
32
keyboards/aos/tkl/rules.mk
Normal file
@@ -0,0 +1,32 @@
|
||||
# MCU name
|
||||
MCU = atmega32u4
|
||||
|
||||
# Bootloader selection
|
||||
# Teensy halfkay
|
||||
# Pro Micro caterina
|
||||
# Atmel DFU atmel-dfu
|
||||
# LUFA DFU lufa-dfu
|
||||
# QMK DFU qmk-dfu
|
||||
# ATmega32A bootloadHID
|
||||
# ATmega328P USBasp
|
||||
BOOTLOADER = atmel-dfu
|
||||
|
||||
# Build Options
|
||||
# change yes to no to disable
|
||||
#
|
||||
BOOTMAGIC_ENABLE = lite # Virtual DIP switch configuration
|
||||
MOUSEKEY_ENABLE = no # Mouse keys
|
||||
EXTRAKEY_ENABLE = yes # Audio control and System control
|
||||
CONSOLE_ENABLE = no # Console for debug
|
||||
COMMAND_ENABLE = no # Commands for debug and configuration
|
||||
# Do not enable SLEEP_LED_ENABLE. it uses the same timer as BACKLIGHT_ENABLE
|
||||
SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend
|
||||
# if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work
|
||||
NKRO_ENABLE = no # USB Nkey Rollover
|
||||
BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality
|
||||
RGBLIGHT_ENABLE = yes # Enable keyboard RGB underglow
|
||||
MIDI_ENABLE = no # MIDI support
|
||||
UNICODE_ENABLE = no # Unicode
|
||||
BLUETOOTH_ENABLE = no # Enable Bluetooth with the Adafruit EZ-Key HID
|
||||
AUDIO_ENABLE = no # Audio output on port C6
|
||||
FAUXCLICKY_ENABLE = no # Use buzzer to emulate clicky switches
|
||||
18
keyboards/aos/tkl/tkl.c
Normal file
18
keyboards/aos/tkl/tkl.c
Normal file
@@ -0,0 +1,18 @@
|
||||
/*
|
||||
Copyright 2020 aholland909
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#include "tkl.h"
|
||||
46
keyboards/aos/tkl/tkl.h
Normal file
46
keyboards/aos/tkl/tkl.h
Normal file
@@ -0,0 +1,46 @@
|
||||
/*
|
||||
Copyright 2020 aholland909
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#pragma once
|
||||
|
||||
#include "quantum.h"
|
||||
|
||||
/* This a shortcut to help you visually see your layout.
|
||||
*
|
||||
* The first section contains all of the arguments representing the physical
|
||||
* layout of the board and position of the keys.
|
||||
*
|
||||
* The second converts the arguments into a two-dimensional array which
|
||||
* represents the switch matrix.
|
||||
*/
|
||||
|
||||
#define LAYOUT_tkl_iso_wkl( \
|
||||
K000, K002, K003, K004, K005, K006, K007, K008, K009, K010, K011, K012, K013, K014, K015, K016, \
|
||||
\
|
||||
K100, K101, K102, K103, K104, K105, K106, K107, K108, K109, K110, K111, K112, K113, K114, K115, K116, \
|
||||
K200, K201, K202, K203, K204, K205, K206, K207, K208, K209, K210, K211, K212, K214, K215, K216, \
|
||||
K300, K301, K302, K303, K304, K305, K306, K307, K308, K309, K310, K311, K312, K213, \
|
||||
K400, K401, K402, K403, K404, K405, K406, K407, K408, K409, K410, K411, K412, K415, \
|
||||
K500, K502, K505, K510, K512, K513, K515, K516 \
|
||||
) { \
|
||||
{ K000, KC_NO, K002, K003, K004, K005, K006, K007, K008, K009, K010, K011, K012, K013, K014, K015, K016 }, \
|
||||
{ K100, K101, K102, K103, K104, K105, K106, K107, K108, K109, K110, K111, K112, K113, K114, K115, K116 }, \
|
||||
{ K200, K201, K202, K203, K204, K205, K206, K207, K208, K209, K210, K211, K212, K213, K214, K215, K216 }, \
|
||||
{ K300, K301, K302, K303, K304, K305, K306, K307, K308, K309, K310, K311, K312, KC_NO, KC_NO, KC_NO, KC_NO }, \
|
||||
{ K400, K401, K402, K403, K404, K405, K406, K407, K408, K409, K410, K411, K412, KC_NO, KC_NO, K415, KC_NO }, \
|
||||
{ K500, KC_NO, K502, KC_NO, KC_NO, KC_NO, KC_NO, K505, KC_NO, KC_NO, K510, KC_NO, K512, K513, KC_NO, K515, K516 }, \
|
||||
}
|
||||
@@ -28,7 +28,7 @@
|
||||
* ROW2COL = ROW = Anode (+), COL = Cathode (-, marked on diode)
|
||||
*
|
||||
*/
|
||||
#define PDBDOWN 1
|
||||
#define PCBDOWN 1
|
||||
|
||||
#define MATRIX_ROW_PINS { D0, D1, D3, D2 }
|
||||
#define MATRIX_COL_PINS { B7, D6, F7, F6, B6, D4, E6, B4, B5, C6, D7 }
|
||||
|
||||
@@ -5,7 +5,7 @@ Baguette
|
||||
|
||||
This is a custom keyboard with backlight inspired by France.
|
||||
|
||||
Keyboard Maintainer: [Yiancar](http://yiancar-designs.com/) and on [github](https://github.com/yiancar)
|
||||
Keyboard Maintainer: [Yiancar](http://yiancar-designs.com/) and on [GitHub](https://github.com/yiancar)
|
||||
Hardware Supported: ATMEGA 32u4 MCU with backlight support.
|
||||
Hardware Availability: Closed group-buy please contact the runners (Tesletron and Enjoy)
|
||||
|
||||
|
||||
@@ -19,8 +19,8 @@
|
||||
#include "config_common.h"
|
||||
|
||||
/* USB Device descriptor parameter */
|
||||
#define VENDOR_ID 0xFEED
|
||||
#define PRODUCT_ID 0x6060
|
||||
#define VENDOR_ID 0x544B //TK
|
||||
#define PRODUCT_ID 0x0003
|
||||
#define DEVICE_VER 0x0006
|
||||
#define MANUFACTURER The Key Company
|
||||
#define PRODUCT Candybar
|
||||
|
||||
38
keyboards/candybar/lefty/keymaps/via/keymap.c
Normal file
38
keyboards/candybar/lefty/keymaps/via/keymap.c
Normal file
@@ -0,0 +1,38 @@
|
||||
/* Copyright 2018 Jack Humbert
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
#define _BL 0
|
||||
#define _FL 1
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
/* Keymap _BL: Base Layer (Default Layer)
|
||||
*/
|
||||
[_BL] = LAYOUT(
|
||||
KC_P7 , KC_P8, KC_P9 , KC_PAST, KC_ESC , KC_Q , KC_W , KC_E, KC_R , KC_T , KC_Y, KC_U , KC_I , KC_O , KC_P , KC_DEL , KC_BSPC , \
|
||||
KC_P4 , KC_P5, KC_P6 , KC_PMNS, KC_TAB , KC_A , KC_S , KC_D, KC_F , KC_G , KC_H, KC_J , KC_K , KC_L , KC_SCLN, KC_ENT , \
|
||||
KC_P1 , KC_P2, KC_P3 , KC_PPLS, KC_LSFT, KC_Z , KC_X, KC_C , KC_V , KC_B, KC_N , KC_M , KC_COMM, KC_DOT , KC_UP ,KC_RSFT , \
|
||||
MO(_FL), KC_P0, KC_PDOT, KC_PENT, KC_LCTL, KC_LGUI, KC_LALT, KC_SPC, KC_SPC , KC_BSPC, KC_APP , KC_LEFT, KC_DOWN, KC_RGHT),
|
||||
|
||||
/* Keymap _FL: Function Layer
|
||||
*/
|
||||
[_FL] = LAYOUT(
|
||||
KC_P7 , KC_P8, KC_P9 , KC_VOLU, RESET , KC_Q , KC_W , KC_E, KC_R , KC_T , KC_Y, KC_U , KC_I , KC_LBRC, KC_RBRC, KC_INS , KC_BSPC , \
|
||||
KC_P4 , KC_P5, KC_P6 , KC_VOLD, KC_TAB , KC_A , KC_SLCK, KC_D, KC_F , KC_G , KC_H, KC_J , KC_K , KC_L , KC_QUOT, KC_BSLS , \
|
||||
KC_P1 , KC_P2, KC_P3 , KC_PEQL, KC_LSFT, KC_Z , KC_X, KC_CAPS, KC_V , KC_B, KC_NLCK, KC_M , KC_COMM, KC_DOT , KC_SLSH, KC_PGUP , \
|
||||
KC_END, KC_P0, KC_PDOT, KC_PENT, KC_LCTL, KC_LGUI, KC_LALT, KC_SPC, KC_SPC , KC_BSPC, KC_APP , MO(_FL), KC_HOME, KC_PGDN),
|
||||
};
|
||||
1
keyboards/candybar/lefty/keymaps/via/rules.mk
Normal file
1
keyboards/candybar/lefty/keymaps/via/rules.mk
Normal file
@@ -0,0 +1 @@
|
||||
VIA_ENABLE = yes
|
||||
@@ -7,7 +7,7 @@ MCU = STM32F072
|
||||
# EXTRAFLAGS+=-flto
|
||||
LINK_TIME_OPTIMIZATION_ENABLE = yes
|
||||
BACKLIGHT_ENABLE = no
|
||||
BOOTMAGIC_ENABLE = yes # Virtual DIP switch configuration
|
||||
BOOTMAGIC_ENABLE = lite # Virtual DIP switch configuration
|
||||
## (Note that for BOOTMAGIC on Teensy LC you have to use a custom .ld script.)
|
||||
MOUSEKEY_ENABLE = no # Mouse keys
|
||||
EXTRAKEY_ENABLE = yes # Audio control and System control
|
||||
|
||||
@@ -19,8 +19,8 @@
|
||||
#include "config_common.h"
|
||||
|
||||
/* USB Device descriptor parameter */
|
||||
#define VENDOR_ID 0xFEED
|
||||
#define PRODUCT_ID 0x6060
|
||||
#define VENDOR_ID 0x544B //TK
|
||||
#define PRODUCT_ID 0x0002
|
||||
#define DEVICE_VER 0x0006
|
||||
#define MANUFACTURER The Key Company
|
||||
#define PRODUCT Candybar
|
||||
|
||||
38
keyboards/candybar/righty/keymaps/via/keymap.c
Normal file
38
keyboards/candybar/righty/keymaps/via/keymap.c
Normal file
@@ -0,0 +1,38 @@
|
||||
/* Copyright 2018 Jack Humbert
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
#define _BL 0
|
||||
#define _FL 1
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
/* Keymap _BL: Base Layer (Default Layer)
|
||||
*/
|
||||
[_BL] = LAYOUT(
|
||||
KC_ESC,KC_Q,KC_W,KC_E,KC_R,KC_T,KC_Y,KC_U,KC_I,KC_O,KC_P,KC_DEL,KC_BSPC,KC_P7,KC_P8,KC_P9,KC_PAST, \
|
||||
KC_TAB,KC_A,KC_S,KC_D,KC_F,KC_G,KC_H,KC_J,KC_K,KC_L,KC_SCLN,KC_ENT,KC_P4,KC_P5,KC_P6,KC_PMNS, \
|
||||
KC_LSFT,KC_Z,KC_X,KC_C,KC_V,KC_B,KC_N,KC_M,KC_COMM,KC_DOT,KC_RSFT,KC_UP,KC_P1,KC_P2,KC_P3,KC_PPLS, \
|
||||
KC_LCTL,KC_LGUI,KC_LALT,KC_SPC,KC_SPC,KC_BSPC,KC_APP,MO(_FL),KC_LEFT,KC_DOWN,KC_RGHT,KC_P0,KC_PDOT,KC_PENT),
|
||||
|
||||
/* Keymap _FL: Function Layer
|
||||
*/
|
||||
[_FL] = LAYOUT(
|
||||
RESET,KC_Q,KC_W,KC_E,KC_R,KC_T,KC_Y,KC_U,KC_I,KC_LBRC,KC_RBRC,KC_INS,KC_BSPC,KC_P7,KC_P8,KC_P9,KC_VOLU, \
|
||||
KC_TAB,KC_A,KC_SLCK,KC_D,KC_F,KC_G,KC_H,KC_J,KC_K,KC_L,KC_QUOT,KC_BSLS,KC_P4,KC_P5,KC_P6,KC_VOLD, \
|
||||
KC_LSFT,KC_Z,KC_X,KC_CAPS,KC_V,KC_B,KC_NLCK,KC_M,KC_COMM,KC_DOT,KC_SLSH,KC_PGUP,KC_P1,KC_P2,KC_P3,KC_PEQL, \
|
||||
KC_LCTL,KC_LGUI,KC_LALT,KC_SPC,KC_SPC,KC_BSPC,KC_APP,MO(_FL),KC_HOME,KC_PGDN,KC_END,KC_P0,KC_PDOT,KC_PENT),
|
||||
};
|
||||
1
keyboards/candybar/righty/keymaps/via/rules.mk
Normal file
1
keyboards/candybar/righty/keymaps/via/rules.mk
Normal file
@@ -0,0 +1 @@
|
||||
VIA_ENABLE = yes
|
||||
@@ -7,7 +7,7 @@ MCU = STM32F072
|
||||
# EXTRAFLAGS+=-flto
|
||||
LINK_TIME_OPTIMIZATION_ENABLE = yes
|
||||
BACKLIGHT_ENABLE = no
|
||||
BOOTMAGIC_ENABLE = yes # Virtual DIP switch configuration
|
||||
BOOTMAGIC_ENABLE = lite # Virtual DIP switch configuration
|
||||
## (Note that for BOOTMAGIC on Teensy LC you have to use a custom .ld script.)
|
||||
MOUSEKEY_ENABLE = no # Mouse keys
|
||||
EXTRAKEY_ENABLE = yes # Audio control and System control
|
||||
|
||||
23
keyboards/chimera_ortho_plus/chimera_ortho_plus.c
Normal file
23
keyboards/chimera_ortho_plus/chimera_ortho_plus.c
Normal file
@@ -0,0 +1,23 @@
|
||||
#include "chimera_ortho_plus.h"
|
||||
|
||||
void uart_init(void) {
|
||||
SERIAL_UART_INIT();
|
||||
}
|
||||
|
||||
void led_init(void) {
|
||||
setPinOutput(D1);
|
||||
setPinOutput(F4);
|
||||
setPinOutput(F5);
|
||||
writePinHigh(D1);
|
||||
writePinHigh(F4);
|
||||
writePinHigh(F5);
|
||||
}
|
||||
|
||||
|
||||
void matrix_init_kb(void) {
|
||||
// put your keyboard start-up code here
|
||||
// runs once when the firmware starts up
|
||||
matrix_init_user();
|
||||
uart_init();
|
||||
led_init();
|
||||
}
|
||||
38
keyboards/chimera_ortho_plus/chimera_ortho_plus.h
Normal file
38
keyboards/chimera_ortho_plus/chimera_ortho_plus.h
Normal file
@@ -0,0 +1,38 @@
|
||||
#pragma once
|
||||
|
||||
#include "quantum.h"
|
||||
|
||||
#define red_led_off PORTF |= (1<<5)
|
||||
#define red_led_on PORTF &= ~(1<<5)
|
||||
#define blu_led_off PORTF |= (1<<4)
|
||||
#define blu_led_on PORTF &= ~(1<<4)
|
||||
#define grn_led_off PORTD |= (1<<1)
|
||||
#define grn_led_on PORTD &= ~(1<<1)
|
||||
|
||||
#define set_led_off red_led_off; grn_led_off; blu_led_off
|
||||
#define set_led_red red_led_on; grn_led_off; blu_led_off
|
||||
#define set_led_blue red_led_off; grn_led_off; blu_led_on
|
||||
#define set_led_green red_led_off; grn_led_on; blu_led_off
|
||||
#define set_led_yellow red_led_on; grn_led_on; blu_led_off
|
||||
#define set_led_magenta red_led_on; grn_led_off; blu_led_on
|
||||
#define set_led_cyan red_led_off; grn_led_on; blu_led_on
|
||||
#define set_led_white red_led_on; grn_led_on; blu_led_on
|
||||
|
||||
// This a shortcut to help you visually see your layout.
|
||||
// The first section contains all of the arguements
|
||||
// The second converts the arguments into a two-dimensional array
|
||||
|
||||
#define LAYOUT( \
|
||||
k00, k01, k02, k03, k04, k05, k06, k07, k08, k09, k10, k11, \
|
||||
k12, k13, k14, k15, k16, k17, k18, k19, k20, k21, k22, k23, \
|
||||
k24, k25, k26, k27, k28, k29, k30, k31, k32, k33, k34, k35, \
|
||||
k36, k37, k38, k39, k40, k41, k42, k43, k44, k45, k46, k47, \
|
||||
k48, k49, k50, k51 \
|
||||
) \
|
||||
{ \
|
||||
{ k03, k40, k26, k15, k28, k01, k42, k31, k20, k33, k08, k10 }, \
|
||||
{ k00, k37, k14, k27, k16, k36, k47, k19, k32, k21, k46, k11 }, \
|
||||
{ k12, k25, k02, k39, k17, k49, k50, k18, k44, k09, k34, k23 }, \
|
||||
{ k24, k13, k38, k04, k05, k48, k51, k06, k07, k45, k22, k35 }, \
|
||||
{ k29, k41, KC_NO, KC_NO, KC_NO, KC_NO, k30, k43, KC_NO, KC_NO, KC_NO, KC_NO } \
|
||||
}
|
||||
76
keyboards/chimera_ortho_plus/config.h
Normal file
76
keyboards/chimera_ortho_plus/config.h
Normal file
@@ -0,0 +1,76 @@
|
||||
/*
|
||||
Copyright 2012 Jun Wako <wakojun@gmail.com>
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#pragma once
|
||||
|
||||
#include "config_common.h"
|
||||
|
||||
/* USB Device descriptor parameter */
|
||||
|
||||
#define VENDOR_ID 0xFEED
|
||||
#define PRODUCT_ID 0xDE1D
|
||||
#define DEVICE_VER 0x0001
|
||||
#define MANUFACTURER unknown
|
||||
#define PRODUCT Chimera Ortho Plus
|
||||
#define DESCRIPTION q.m.k. keyboard firmware for Chimera Ortho Plus
|
||||
|
||||
/* key matrix size */
|
||||
#define MATRIX_ROWS 6
|
||||
#define MATRIX_COLS 12
|
||||
|
||||
/* define if matrix has ghost */
|
||||
//#define MATRIX_HAS_GHOST
|
||||
|
||||
/* number of backlight levels */
|
||||
//#define BACKLIGHT_LEVELS 3
|
||||
|
||||
#define ONESHOT_TIMEOUT 500
|
||||
|
||||
/*
|
||||
* Feature disable options
|
||||
* These options are also useful to firmware size reduction.
|
||||
*/
|
||||
|
||||
/* disable debug print */
|
||||
//#define NO_DEBUG
|
||||
|
||||
/* disable print */
|
||||
//#define NO_PRINT
|
||||
|
||||
/* disable action features */
|
||||
//#define NO_ACTION_LAYER
|
||||
//#define NO_ACTION_TAPPING
|
||||
//#define NO_ACTION_ONESHOT
|
||||
//#define NO_ACTION_MACRO
|
||||
//#define NO_ACTION_FUNCTION
|
||||
|
||||
//UART settings for communication with the RF microcontroller
|
||||
#define SERIAL_UART_BAUD 1000000
|
||||
#define SERIAL_UART_DATA UDR1
|
||||
#define SERIAL_UART_UBRR (F_CPU / (16UL * SERIAL_UART_BAUD) - 1)
|
||||
#define SERIAL_UART_TXD_READY (UCSR1A & _BV(UDRE1))
|
||||
#define SERIAL_UART_RXD_PRESENT (UCSR1A & _BV(RXC1))
|
||||
#define SERIAL_UART_INIT() do { \
|
||||
/* baud rate */ \
|
||||
UBRR1L = SERIAL_UART_UBRR; \
|
||||
/* baud rate */ \
|
||||
UBRR1H = SERIAL_UART_UBRR >> 8; \
|
||||
/* enable TX and RX */ \
|
||||
UCSR1B = _BV(TXEN1) | _BV(RXEN1); \
|
||||
/* 8-bit data */ \
|
||||
UCSR1C = _BV(UCSZ11) | _BV(UCSZ10); \
|
||||
} while(0)
|
||||
65
keyboards/chimera_ortho_plus/info.json
Normal file
65
keyboards/chimera_ortho_plus/info.json
Normal file
@@ -0,0 +1,65 @@
|
||||
{
|
||||
"keyboard_name": "Chimera Ortho Plus",
|
||||
"keyboard_folder": "chimera_ortho_plus",
|
||||
"maintainer": "qmk",
|
||||
"width": 13.5,
|
||||
"height": 6,
|
||||
"layouts": {
|
||||
"LAYOUT": {
|
||||
"layout": [
|
||||
{"label": "{", "x": 0, "y": 0},
|
||||
{"label": "1", "x": 1, "y": 0},
|
||||
{"label": "2", "x": 2, "y": 0},
|
||||
{"label": "3", "x": 3, "y": 0},
|
||||
{"label": "4", "x": 4, "y": 0},
|
||||
{"label": "5", "x": 5, "y": 0},
|
||||
{"label": "6", "x": 7.5, "y": 0},
|
||||
{"label": "7", "x": 8.5, "y": 0},
|
||||
{"label": "8", "x": 9.5, "y": 0},
|
||||
{"label": "9", "x": 10.5, "y": 0},
|
||||
{"label": "0", "x": 11.5, "y": 0},
|
||||
{"label": "}", "x": 12.5, "y": 0},
|
||||
{"label": "Esc", "x": 0, "y": 1},
|
||||
{"label": "Q", "x": 1, "y": 1},
|
||||
{"label": "W", "x": 2, "y": 1},
|
||||
{"label": "E", "x": 3, "y": 1},
|
||||
{"label": "R", "x": 4, "y": 1},
|
||||
{"label": "T", "x": 5, "y": 1},
|
||||
{"label": "Y", "x": 7.5, "y": 1},
|
||||
{"label": "U", "x": 8.5, "y": 1},
|
||||
{"label": "I", "x": 9.5, "y": 1},
|
||||
{"label": "O", "x": 10.5, "y": 1},
|
||||
{"label": "P", "x": 11.5, "y": 1},
|
||||
{"label": "\"", "x": 12.5, "y": 1},
|
||||
{"label": "Tab", "x": 0, "y": 2},
|
||||
{"label": "A", "x": 1, "y": 2},
|
||||
{"label": "S", "x": 2, "y": 2},
|
||||
{"label": "D", "x": 3, "y": 2},
|
||||
{"label": "F", "x": 4, "y": 2},
|
||||
{"label": "G", "x": 5, "y": 2},
|
||||
{"label": "H", "x": 7.5, "y": 2},
|
||||
{"label": "J", "x": 8.5, "y": 2},
|
||||
{"label": "K", "x": 9.5, "y": 2},
|
||||
{"label": "L", "x": 10.5, "y": 2},
|
||||
{"label": ";", "x": 11.5, "y": 2},
|
||||
{"label": "Enter", "x": 12.5, "y": 2},
|
||||
{"label": "(", "x": 0, "y": 3},
|
||||
{"label": "Z", "x": 1, "y": 3},
|
||||
{"label": "X", "x": 2, "y": 3},
|
||||
{"label": "C", "x": 3, "y": 3},
|
||||
{"label": "V", "x": 4, "y": 3},
|
||||
{"label": "B", "x": 5, "y": 3},
|
||||
{"label": "N", "x": 7.5, "y": 3},
|
||||
{"label": "M", "x": 8.5, "y": 3},
|
||||
{"label": ",", "x": 9.5, "y": 3},
|
||||
{"label": ".", "x": 10.5, "y": 3},
|
||||
{"label": "/", "x": 11.5, "y": 3},
|
||||
{"label": ")", "x": 12.5, "y": 3},
|
||||
{"label": "Num Layer", "x": 4, "y": 4},
|
||||
{"label": "Back Space", "x": 5, "y": 4},
|
||||
{"label": "Space", "x": 7.5, "y": 4},
|
||||
{"label": "Symbol Layer", "x": 8.5, "y": 4}
|
||||
]
|
||||
}
|
||||
}
|
||||
}
|
||||
5
keyboards/chimera_ortho_plus/keymaps/default/config.h
Normal file
5
keyboards/chimera_ortho_plus/keymaps/default/config.h
Normal file
@@ -0,0 +1,5 @@
|
||||
#pragma once
|
||||
|
||||
// place overrides here
|
||||
#define LONGPRESS_DELAY 150
|
||||
//#define LAYER_TOGGLE_DELAY 300
|
||||
185
keyboards/chimera_ortho_plus/keymaps/default/keymap.c
Normal file
185
keyboards/chimera_ortho_plus/keymaps/default/keymap.c
Normal file
@@ -0,0 +1,185 @@
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
// Each layer gets a name for readability, which is then used in the keymap matrix below.
|
||||
// The underscores don't mean anything - you can have a layer called STUFF or any other name.
|
||||
// Layer names don't all need to be of the same length, obviously, and you can also skip them
|
||||
// entirely and just use numbers.
|
||||
enum chimera_ortho_plus_layers {
|
||||
_QWERTY,
|
||||
_CAPS,
|
||||
_NUMPAD,
|
||||
_SYMBOLS,
|
||||
_MACROS,
|
||||
_NAV
|
||||
};
|
||||
|
||||
#define KC_NMPD TG(_NUMPAD)
|
||||
#define KC_SYMB TG(_SYMBOLS)
|
||||
#define KC_SPFN LT(_NAV,KC_4)
|
||||
#define KC_SCTL MT(MOD_LCTL, KC_2)
|
||||
#define KC_SCTR MT(MOD_LCTL, KC_9)
|
||||
#define KC_SPLT MT(MOD_LALT, KC_3)
|
||||
#define KC_SPRT MT(MOD_LALT, KC_8)
|
||||
#define KC_GBRC MT(MOD_RGUI, KC_7)
|
||||
#define KC_GQOT MT(MOD_LGUI, KC_QUOT)
|
||||
#define KC_MESC LT(_MACROS, KC_ESC)
|
||||
#define KC_CAD LALT(LCTL(KC_DEL))
|
||||
|
||||
enum custom_keycodes {
|
||||
KC_INCL = SAFE_RANGE,
|
||||
KC_PULL,
|
||||
KC_PUSH,
|
||||
KC_SCAP,
|
||||
KC_SCOF
|
||||
};
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
|
||||
[_QWERTY] = LAYOUT(
|
||||
//,-------+-------+-------+-------+-------+-------. ,-------+-------+-------+-------+-------+-------.
|
||||
KC_LBRC, KC_1 ,KC_SCTL,KC_SPLT,KC_SPFN, KC_5 , KC_6 ,KC_GBRC,KC_SPRT,KC_SCTR, KC_0 ,KC_RBRC,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
KC_MESC, KC_Q , KC_W , KC_E , KC_R , KC_T , KC_Y , KC_U , KC_I , KC_O , KC_P ,KC_QUOT,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
KC_TAB , KC_A , KC_S , KC_D , KC_F , KC_G , KC_H , KC_J , KC_K , KC_L ,KC_SCLN,KC_ENT ,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
KC_LSPO, KC_Z , KC_X , KC_C , KC_V , KC_B , KC_N , KC_M ,KC_COMM,KC_DOT ,KC_SLSH,KC_RSPC,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
KC_NMPD,KC_BSPC, KC_SPC ,KC_SYMB
|
||||
//|-------------------------------+-------+-------| |-------+-------+-------------------------------|
|
||||
),
|
||||
|
||||
[_CAPS] = LAYOUT(
|
||||
//,-------+-------+-------+-------+-------+-------. ,-------+-------+-------+-------+-------+-------.
|
||||
_______,KC_UNDS,_______,_______,_______,_______, _______,_______,_______,_______,_______,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______,_______,_______,_______,_______, _______,_______,_______,_______,_______,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______,_______,_______,_______,_______, _______,_______,_______,_______,KC_COLN,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
KC_SCOF,_______,_______,_______,_______,_______, _______,_______,_______,_______,_______,KC_SCOF,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______, _______,_______
|
||||
//|-------------------------------+-------+-------| |-------+-------+-------------------------------|
|
||||
),
|
||||
|
||||
[_NUMPAD] = LAYOUT(
|
||||
//,-------+-------+-------+-------+-------+-------. ,-------+-------+-------+-------+-------+-------.
|
||||
_______,_______,_______,_______,_______,_______, _______,_______,_______,_______,KC_MINS,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______,KC_COLN,_______,_______,_______, _______, KC_7 , KC_8 , KC_9 ,KC_ASTR,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______,KC_DOT ,_______,_______,_______, _______, KC_4 , KC_5 , KC_6 ,KC_PLUS,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______,_______,_______,_______,_______, _______, KC_1 , KC_2 , KC_3 ,KC_SLSH,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______, _______, KC_0
|
||||
//|-------------------------------+-------+-------/ |-------+-------+-------------------------------|
|
||||
),
|
||||
|
||||
[_SYMBOLS] = LAYOUT(
|
||||
//,-------+-------+-------+-------+-------+-------. ,-------+-------+-------+-------+-------+-------.
|
||||
_______,_______,_______,_______,_______,_______, _______,_______,_______,_______,_______,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,KC_EXLM, KC_AT ,KC_HASH,KC_DLR ,KC_PERC, KC_CIRC,KC_AMPR,KC_ASTR,KC_LPRN,KC_RPRN,KC_BSLS,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
KC_F1 , KC_F2 , KC_F3 , KC_F4 , KC_F5 , KC_F6 , KC_TILD,KC_EQL ,KC_UNDS,KC_LCBR,KC_RCBR,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
KC_F7 , KC_F8 , KC_F9 ,KC_F10 ,KC_F11 ,KC_F12 , KC_GRV ,KC_PLUS,KC_MINS,KC_LBRC,KC_RBRC,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
KC_PIPE,_______, _______,_______
|
||||
//|-------------------------------+-------+-------| |-------+-------+-------------------------------|
|
||||
),
|
||||
|
||||
[_MACROS] = LAYOUT(
|
||||
//,-------+-------+-------+-------+-------+-------. ,-------+-------+-------+-------+-------+-------.
|
||||
_______,_______,_______,_______,_______,_______, _______ ,_______,_______,_______,_______,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______,_______,_______,_______,_______, _______ ,_______,KC_INCL,_______,_______,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______,_______,KC_CAD ,_______,_______, _______ ,_______,_______,_______,_______,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
KC_SCAP,_______,_______,_______,_______,_______, _______ ,_______,KC_PULL,KC_PUSH,_______,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______, _______,_______
|
||||
//|-------------------------------+-------+-------| |-------+-------+-------------------------------|
|
||||
),
|
||||
|
||||
[_NAV] = LAYOUT(
|
||||
//,-------+-------+-------+-------+-------+-------. ,-------+-------+-------+-------+-------+-------.
|
||||
_______,_______,_______,_______,_______,_______, _______,_______,_______,_______,_______,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______,_______,_______,_______,_______, _______,KC_PGUP, KC_UP ,KC_PGDN,KC_PSCR,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______,_______,_______,_______,_______, _______,KC_LEFT,KC_DOWN,KC_RGHT,_______,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,_______,_______,_______,_______,_______, _______,_______,_______,_______,_______,_______,
|
||||
//|-------+-------+-------+-------+-------+-------| |-------+-------+-------+-------+-------+-------|
|
||||
_______,KC_DEL , _______,_______
|
||||
//|-------------------------------+-------+-------| |-------+-------+-------------------------------|
|
||||
)
|
||||
};
|
||||
|
||||
|
||||
bool process_record_user(uint16_t keycode, keyrecord_t *record) {
|
||||
switch(keycode) {
|
||||
/* include some kind of library or header */
|
||||
case KC_INCL:
|
||||
if (record->event.pressed) {
|
||||
SEND_STRING("#include <>" SS_TAP(X_LEFT));
|
||||
}
|
||||
return false;
|
||||
case KC_PULL:
|
||||
if (record->event.pressed) {
|
||||
SEND_STRING("git pull\n");
|
||||
}
|
||||
return false;
|
||||
case KC_PUSH:
|
||||
if (record->event.pressed){
|
||||
SEND_STRING("git push\n");
|
||||
}
|
||||
return false;
|
||||
case KC_SCAP:
|
||||
if (record->event.pressed){
|
||||
layer_on(_CAPS);
|
||||
tap_code(KC_CAPS);
|
||||
}
|
||||
return false;
|
||||
case KC_SCOF:
|
||||
if (record->event.pressed){
|
||||
layer_off(_CAPS);
|
||||
tap_code(KC_CAPS);
|
||||
}
|
||||
return false;
|
||||
}
|
||||
return true;
|
||||
};
|
||||
|
||||
|
||||
void matrix_scan_user(void) {
|
||||
uint8_t layer = get_highest_layer(layer_state);
|
||||
|
||||
switch (layer) {
|
||||
case _QWERTY:
|
||||
set_led_green;
|
||||
break;
|
||||
case _CAPS:
|
||||
set_led_white;
|
||||
break;
|
||||
case _NUMPAD:
|
||||
set_led_blue;
|
||||
break;
|
||||
case _SYMBOLS:
|
||||
set_led_red;
|
||||
break;
|
||||
case _MACROS:
|
||||
set_led_cyan;
|
||||
break;
|
||||
case _NAV:
|
||||
set_led_magenta;
|
||||
break;
|
||||
default:
|
||||
set_led_green;
|
||||
break;
|
||||
}
|
||||
};
|
||||
154
keyboards/chimera_ortho_plus/matrix.c
Normal file
154
keyboards/chimera_ortho_plus/matrix.c
Normal file
@@ -0,0 +1,154 @@
|
||||
/*
|
||||
Copyright 2012 Jun Wako
|
||||
Copyright 2014 Jack Humbert
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#include <stdint.h>
|
||||
#include <stdbool.h>
|
||||
#if defined(__AVR__)
|
||||
#include <avr/io.h>
|
||||
#endif
|
||||
#include "wait.h"
|
||||
#include "print.h"
|
||||
#include "debug.h"
|
||||
#include "util.h"
|
||||
#include "matrix.h"
|
||||
#include "timer.h"
|
||||
|
||||
#if (MATRIX_COLS <= 8)
|
||||
# define print_matrix_header() print("\nr/c 01234567\n")
|
||||
# define print_matrix_row(row) print_bin_reverse8(matrix_get_row(row))
|
||||
# define matrix_bitpop(i) bitpop(matrix[i])
|
||||
# define ROW_SHIFTER ((uint8_t)1)
|
||||
#elif (MATRIX_COLS <= 16)
|
||||
# define print_matrix_header() print("\nr/c 0123456789ABCDEF\n")
|
||||
# define print_matrix_row(row) print_bin_reverse16(matrix_get_row(row))
|
||||
# define matrix_bitpop(i) bitpop16(matrix[i])
|
||||
# define ROW_SHIFTER ((uint16_t)1)
|
||||
#elif (MATRIX_COLS <= 32)
|
||||
# define print_matrix_header() print("\nr/c 0123456789ABCDEF0123456789ABCDEF\n")
|
||||
# define print_matrix_row(row) print_bin_reverse32(matrix_get_row(row))
|
||||
# define matrix_bitpop(i) bitpop32(matrix[i])
|
||||
# define ROW_SHIFTER ((uint32_t)1)
|
||||
#endif
|
||||
|
||||
/* matrix state(1:on, 0:off) */
|
||||
static matrix_row_t matrix[MATRIX_ROWS];
|
||||
|
||||
__attribute__ ((weak))
|
||||
void matrix_init_kb(void) {
|
||||
matrix_init_user();
|
||||
}
|
||||
|
||||
__attribute__ ((weak))
|
||||
void matrix_scan_kb(void) {
|
||||
matrix_scan_user();
|
||||
}
|
||||
|
||||
__attribute__ ((weak))
|
||||
void matrix_init_user(void) {
|
||||
}
|
||||
|
||||
__attribute__ ((weak))
|
||||
void matrix_scan_user(void) {
|
||||
}
|
||||
|
||||
inline
|
||||
uint8_t matrix_rows(void) {
|
||||
return MATRIX_ROWS;
|
||||
}
|
||||
|
||||
inline
|
||||
uint8_t matrix_cols(void) {
|
||||
return MATRIX_COLS;
|
||||
}
|
||||
|
||||
void matrix_init(void) {
|
||||
|
||||
matrix_init_quantum();
|
||||
}
|
||||
|
||||
uint8_t matrix_scan(void)
|
||||
{
|
||||
SERIAL_UART_INIT();
|
||||
|
||||
uint32_t timeout = 0;
|
||||
|
||||
//the s character requests the RF slave to send the matrix
|
||||
SERIAL_UART_DATA = 's';
|
||||
|
||||
//trust the external keystates entirely, erase the last data
|
||||
uint8_t uart_data[14] = {0};
|
||||
|
||||
//there are 10 bytes corresponding to 10 columns, and an end byte
|
||||
for (uint8_t i = 0; i < 14; i++) {
|
||||
//wait for the serial data, timeout if it's been too long
|
||||
//this only happened in testing with a loose wire, but does no
|
||||
//harm to leave it in here
|
||||
while(!SERIAL_UART_RXD_PRESENT){
|
||||
timeout++;
|
||||
if (timeout > 10000){
|
||||
break;
|
||||
}
|
||||
}
|
||||
uart_data[i] = SERIAL_UART_DATA;
|
||||
}
|
||||
|
||||
//check for the end packet, the key state bytes use the LSBs, so 0xE0
|
||||
//will only show up here if the correct bytes were recieved
|
||||
if (uart_data[10] == 0xE0)
|
||||
{
|
||||
//shifting and transferring the keystates to the QMK matrix variable
|
||||
for (uint8_t i = 0; i < MATRIX_ROWS; i++) {
|
||||
matrix[i] = (uint16_t) uart_data[i*2] | (uint16_t) uart_data[i*2+1] << 6;
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
matrix_scan_quantum();
|
||||
return 1;
|
||||
}
|
||||
|
||||
inline
|
||||
bool matrix_is_on(uint8_t row, uint8_t col)
|
||||
{
|
||||
return (matrix[row] & ((matrix_row_t)1<<col));
|
||||
}
|
||||
|
||||
inline
|
||||
matrix_row_t matrix_get_row(uint8_t row)
|
||||
{
|
||||
return matrix[row];
|
||||
}
|
||||
|
||||
void matrix_print(void)
|
||||
{
|
||||
print_matrix_header();
|
||||
|
||||
for (uint8_t row = 0; row < MATRIX_ROWS; row++) {
|
||||
phex(row); print(": ");
|
||||
print_matrix_row(row);
|
||||
print("\n");
|
||||
}
|
||||
}
|
||||
|
||||
uint8_t matrix_key_count(void)
|
||||
{
|
||||
uint8_t count = 0;
|
||||
for (uint8_t i = 0; i < MATRIX_ROWS; i++) {
|
||||
count += matrix_bitpop(i);
|
||||
}
|
||||
return count;
|
||||
}
|
||||
15
keyboards/chimera_ortho_plus/readme.md
Normal file
15
keyboards/chimera_ortho_plus/readme.md
Normal file
@@ -0,0 +1,15 @@
|
||||
# Chimera Ortho+
|
||||
|
||||

|
||||
|
||||
A split wireless 50% ortholinear keyboard.
|
||||
|
||||
* Keyboard Maintainer: [William Wilson](https://github.com/GlenPickle)
|
||||
* Hardware Supported: Chimera Ortho+ PCB, WaveShare core nRF51822
|
||||
* Hardware Availability: [Gerbers](https://github.com/GlenPickle/Chimera/tree/master/ortho_plus/gerbers)
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
make chimera_ortho_plus:default
|
||||
|
||||
See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs).
|
||||
37
keyboards/chimera_ortho_plus/rules.mk
Normal file
37
keyboards/chimera_ortho_plus/rules.mk
Normal file
@@ -0,0 +1,37 @@
|
||||
# MCU name
|
||||
MCU = atmega32u4
|
||||
|
||||
# Bootloader
|
||||
# Teensy halfkay
|
||||
# Pro Micro caterina
|
||||
# Atmel DFU atmel-dfu
|
||||
# LUFA DFU lufa-dfu
|
||||
# QMK DFU qmk-dfu
|
||||
# ATmega32A bootloadHID
|
||||
# ATmega328P USBasp
|
||||
BOOTLOADER = caterina
|
||||
|
||||
# Build Options
|
||||
# change yes to no to disable
|
||||
#
|
||||
BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration
|
||||
MOUSEKEY_ENABLE = yes # Mouse keys
|
||||
EXTRAKEY_ENABLE = yes # Audio control and System control
|
||||
CONSOLE_ENABLE = yes # Console for debug
|
||||
COMMAND_ENABLE = yes # Commands for debug and configuration
|
||||
# Do not enable SLEEP_LED_ENABLE. it uses the same timer as BACKLIGHT_ENABLE
|
||||
SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend
|
||||
# if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work
|
||||
NKRO_ENABLE = yes # USB Nkey Rollover
|
||||
BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality
|
||||
RGBLIGHT_ENABLE = no # Enable keyboard RGB underglow
|
||||
MIDI_ENABLE = no # MIDI support
|
||||
BLUETOOTH_ENABLE = no # Enable Bluetooth with the Adafruit EZ-Key HID
|
||||
AUDIO_ENABLE = no # Audio output
|
||||
FAUXCLICKY_ENABLE = no # Use buzzer to emulate clicky switches
|
||||
HD44780_ENABLE = no # Enable support for HD44780 based LCDs
|
||||
UNICODE_ENABLE = yes
|
||||
CUSTOM_MATRIX = yes
|
||||
|
||||
# project specific files
|
||||
SRC = matrix.c
|
||||
@@ -4,7 +4,7 @@
|
||||
|
||||
A Blue Pill STM32F103C8T6-based Converter board for a very very old keyboard.
|
||||
|
||||
Keyboard Maintainer: [Yiancar](http://yiancar-designs.com/) and on [github](https://github.com/yiancar)
|
||||
Keyboard Maintainer: [Yiancar](http://yiancar-designs.com/) and on [GitHub](https://github.com/yiancar)
|
||||
Hardware Supported: Blue Pill STM32F103C8T6
|
||||
Hardware Availability: Custom PCB available, contact me
|
||||
|
||||
|
||||
446
keyboards/ergodone/keymaps/art/keymap.c
Normal file
446
keyboards/ergodone/keymaps/art/keymap.c
Normal file
@@ -0,0 +1,446 @@
|
||||
#include "art.h"
|
||||
#include "sendstring_workman_zxcvm.h"
|
||||
|
||||
bool is_win = true;
|
||||
|
||||
enum custom_keycodes {
|
||||
keyboardSpecificKeyCode = NEW_SAFE_RANGE //not used
|
||||
};
|
||||
|
||||
void led_show_current_os(void) {
|
||||
if (is_win) {
|
||||
ergodox_right_led_1_on();
|
||||
wait_ms(50);
|
||||
ergodox_right_led_1_off();
|
||||
wait_ms(50);
|
||||
ergodox_right_led_1_on();
|
||||
wait_ms(50);
|
||||
ergodox_right_led_1_off();
|
||||
wait_ms(50);
|
||||
ergodox_right_led_1_on();
|
||||
wait_ms(50);
|
||||
ergodox_right_led_1_off();
|
||||
wait_ms(50);
|
||||
} else {
|
||||
ergodox_right_led_3_on();
|
||||
wait_ms(50);
|
||||
ergodox_right_led_3_off();
|
||||
wait_ms(50);
|
||||
ergodox_right_led_3_on();
|
||||
wait_ms(50);
|
||||
ergodox_right_led_3_off();
|
||||
wait_ms(50);
|
||||
ergodox_right_led_3_on();
|
||||
wait_ms(50);
|
||||
ergodox_right_led_3_off();
|
||||
wait_ms(50);
|
||||
}
|
||||
}
|
||||
|
||||
void matrix_init_user(void) {
|
||||
led_show_current_os();
|
||||
}
|
||||
|
||||
void led_set_user(uint8_t usb_led) {
|
||||
if (usb_led & (1<<USB_LED_CAPS_LOCK)) {
|
||||
ergodox_right_led_2_on();
|
||||
} else {
|
||||
ergodox_right_led_2_off();
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
|
||||
layer_state_t layer_state_set_user(layer_state_t state) {
|
||||
ergodox_board_led_off();
|
||||
ergodox_right_led_1_off();
|
||||
ergodox_right_led_3_off();
|
||||
switch (get_highest_layer(state)) {
|
||||
case NAV:
|
||||
case CTRL_NAV:
|
||||
case SHIFT_NAV:
|
||||
ergodox_right_led_1_on();
|
||||
break;
|
||||
case FKEYS:
|
||||
ergodox_right_led_3_on();
|
||||
break;
|
||||
}
|
||||
return state;
|
||||
};
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
/* Base qwerty layer
|
||||
*
|
||||
* ,--------------------------------------------------. ,--------------------------------------------------.
|
||||
* | ` ~ | 1 | 2 | 3 | 4 | 5 | ESC | | - _ | 6 | 7 | 8 | 9 | 0 | ] |
|
||||
* |--------+------+------+------+------+-------------| |------+------+------+------+------+------+--------|
|
||||
* | Tab | Q | W | E | R | T | ??? | | = | Y | U | I | O | P | [ |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | Caps | A | S | D | F | G |------| |------| H | J | K | L | ; | ' |
|
||||
* |--------+------+------+------+------+------| FKEYS| | FKEYS|------+------+------+------+------+--------|
|
||||
* | LShift | Z | X | C | V | B | | | | N | M | , | . | / git| RShift |
|
||||
* `--------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* |LCtrl |Media\| Win |Alt | NAV | | Home | End |Workmn| | RCtrl|
|
||||
* `----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,---------------.
|
||||
* | Del | Ins | | Left | Right |
|
||||
* ,------|------|------| |------+--------+------.
|
||||
* | | | PgUp | |SFT_NV| | |
|
||||
* | Space|BSpace|------| |------| NAV |Enter |
|
||||
* | | | PgDn | |CTR_NV| | |
|
||||
* `--------------------' `----------------------'
|
||||
*/
|
||||
[QWERTY] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
KC_GRAVE, KC_1, KC_2, KC_3, KC_4, KC_5, KC_ESCAPE,
|
||||
KC_TAB, KC_Q, KC_W, KC_E, KC_R, KC_T, XXXXXXX,
|
||||
KC_CAPS, KC_A, KC_S, KC_D, KC_F, KC_G,
|
||||
KC_LSFT, KC_Z, KC_X, KC_C, KC_V, KC_B, TT(FKEYS),
|
||||
KC_LCTRL, LT(MEDIA, KC_BSLASH), KC_LWIN, KC_LALT, LT(NAV, KC_RIGHT),
|
||||
|
||||
KC_DEL, KC_INS,
|
||||
KC_PGUP,
|
||||
KC_SPC, LT(COMBOS,KC_BSPC), KC_PGDOWN,
|
||||
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
KC_MINS, KC_6, KC_7, KC_8, KC_9, KC_0, KC_RBRC,
|
||||
KC_EQL, KC_Y, KC_U, KC_I, KC_O, KC_P, KC_LBRC,
|
||||
KC_H, KC_J, KC_K, KC_L, KC_SCLN, KC_QUOT,
|
||||
TT(FKEYS), KC_N, KC_M, KC_COMM, KC_DOT, LT(GIT,KC_SLSH), KC_RSFT,
|
||||
KC_HOME, KC_END, DF(WORKMAN), KC_RALT, KC_RCTRL,
|
||||
|
||||
KC_LEFT, KC_RIGHT,
|
||||
LT(SHIFT_NAV, KC_UP),
|
||||
LT(CTRL_NAV, KC_DOWN), MO(NAV), KC_ENT
|
||||
),
|
||||
/* Workman
|
||||
*
|
||||
* ,--------------------------------------------------. ,--------------------------------------------------.
|
||||
* | | | | | | | | | | | | | | | |
|
||||
* |--------+------+------+------+------+-------------| |------+------+------+------+------+------+--------|
|
||||
* | | Q | D | R | W | B | | | | J | F | U | P | ; | |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | A | S | H | T | G |------| |------| Y | N | E | O | I | |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | Z | X | C | V | M | | | | K | L | , | . | / | |
|
||||
* `--------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* | | | | | | | | |QWERTY| | |
|
||||
* `----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,---------------.
|
||||
* | | | | | |
|
||||
* ,------|------|------| |------+--------+------.
|
||||
* | | | | | | | |
|
||||
* | | |------| |------| | |
|
||||
* | | | | | | | |
|
||||
* `--------------------' `----------------------'
|
||||
*/
|
||||
[WORKMAN] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, KC_Q, KC_D, KC_R, KC_W, KC_B, _______,
|
||||
_______, KC_A, KC_S, KC_H, KC_T, KC_G,
|
||||
_______, KC_Z, KC_X, KC_C, KC_V, KC_M, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______,
|
||||
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, KC_J, KC_F, KC_U, KC_P, KC_SCLN, _______,
|
||||
KC_Y, KC_N, KC_E, KC_O, KC_I, _______,
|
||||
_______, KC_K, KC_L, KC_COMM, KC_DOT, KC_SLSH, _______,
|
||||
_______, _______, DF(QWERTY), _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______
|
||||
),
|
||||
|
||||
[FKEYS] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
_______, KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______,
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
_______, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11,
|
||||
_______, _______, _______, _______, _______, _______, KC_F12,
|
||||
_______, _______, _______, _______, _______, KC_PSCREEN,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______
|
||||
),
|
||||
|
||||
[NAV] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
_______, LALT(KC_F1), LALT(KC_F2), LALT(KC_F3), LALT(KC_F4), LALT(KC_F5), _______,
|
||||
_______, _______, KC_HOME, KC_UP, KC_END, KC_PGUP, _______,
|
||||
_______, _______, KC_LEFT, KC_DOWN, KC_RIGHT, KC_PGDOWN,
|
||||
_______, _______, _______, _______, KC_LALT, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, KC_DEL, _______,
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
_______, LALT(KC_F6), LALT(KC_F7), LALT(KC_F8), LALT(KC_F9), LALT(KC_F10), LALT(KC_F11),
|
||||
_______, _______, _______, _______, _______, _______, LALT(KC_F12),
|
||||
_______, CTR_ALT, KC_RSFT, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______
|
||||
),
|
||||
|
||||
[CTRL_NAV] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, CTL_ALT(KC_HOME), CTL_ALT(KC_UP), CTL_ALT(KC_END), CTL_ALT(KC_PGUP), _______,
|
||||
_______, _______, CTL_ALT(KC_LEFT), CTL_ALT(KC_DOWN), CTL_ALT(KC_RIGHT),CTL_ALT(KC_PGDOWN),
|
||||
_______, _______, CTL_ALT(KC_X), CTL_ALT(KC_C), CTL_ALT(KC_V), _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
CTL_ALT(KC_DEL), _______,
|
||||
_______,
|
||||
_______, CTL_ALT(KC_BSPC), CTL_ALT(KC_DEL),
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
CTL_ALT(KC_HOME), CTL_ALT(KC_END), _______, _______, _______,
|
||||
|
||||
CTL_ALT(KC_LEFT), CTL_ALT(KC_RIGHT),
|
||||
KC_RSFT,
|
||||
_______, _______, _______
|
||||
),
|
||||
|
||||
[SHIFT_NAV] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, LSFT(KC_HOME), LSFT(KC_UP), LSFT(KC_END), LSFT(KC_PGUP), _______,
|
||||
_______, _______, LSFT(KC_LEFT), LSFT(KC_DOWN), LSFT(KC_RIGHT), LSFT(KC_PGDOWN),
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______,
|
||||
|
||||
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
LSFT(KC_HOME), LSFT(KC_END), _______, _______, _______,
|
||||
|
||||
LSFT(KC_LEFT), LSFT(KC_RIGHT),
|
||||
_______,
|
||||
CTR_ALT, _______, _______
|
||||
),
|
||||
|
||||
[COMBOS] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
TILD_BLOCK, PRESCRIPTION, _______, _______, FOURS, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, ADMINS, SARCASM, _______, CTRL_CTV, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______,
|
||||
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______,
|
||||
_______, _______, CTRL_LCTV, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______
|
||||
),
|
||||
|
||||
// [STRINGS] = LAYOUT_ergodox(
|
||||
// // -----------------------------------------------------left hand-----------------------------------------------------
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______,
|
||||
|
||||
// _______, _______,
|
||||
// _______,
|
||||
// _______, _______, _______,
|
||||
|
||||
// // -----------------------------------------------------right hand-----------------------------------------------------
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______,
|
||||
|
||||
// _______, _______,
|
||||
// _______,
|
||||
// _______, _______, _______
|
||||
// ),
|
||||
|
||||
[MEDIA] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, KC_MPRV, KC_VOLU, KC_MNXT, _______, _______,
|
||||
_______, _______, _______, KC_VOLD, _______, _______,
|
||||
_______, _______, _______, KC_MUTE, KC_MPLY, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______,
|
||||
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, TOG_OS, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______
|
||||
),
|
||||
|
||||
[GIT] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, G_DIFF, G_RST, _______, G_BRCH, _______,
|
||||
_______, G_ADD, G_S, _______, _______, _______,
|
||||
_______, _______, _______, G_C, _______, G_MERG, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______,
|
||||
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, G_FTCH, _______, G_P, _______, _______,
|
||||
_______, _______, _______, _______, _______, _______,
|
||||
_______, _______, G_LOG, _______, G_DEV, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______
|
||||
),
|
||||
|
||||
[GIT_C] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, G_CHEC, XXXXXXX, XXXXXXX,
|
||||
_______, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
|
||||
XXXXXXX, XXXXXXX,
|
||||
XXXXXXX,
|
||||
XXXXXXX, KC_BSPC, XXXXXXX,
|
||||
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, G_COMM, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, _______,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
|
||||
XXXXXXX, XXXXXXX,
|
||||
XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX
|
||||
),
|
||||
|
||||
[GIT_S] = LAYOUT_ergodox(
|
||||
// -----------------------------------------------------left hand-----------------------------------------------------
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, G_STSH, G_SHOW, G_STAT, XXXXXXX,
|
||||
_______, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
|
||||
XXXXXXX, XXXXXXX,
|
||||
XXXXXXX,
|
||||
XXXXXXX, KC_BSPC, XXXXXXX,
|
||||
|
||||
// -----------------------------------------------------right hand-----------------------------------------------------
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, G_COMM, XXXXXXX, XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, _______,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,
|
||||
|
||||
XXXXXXX, XXXXXXX,
|
||||
XXXXXXX,
|
||||
XXXXXXX, XXXXXXX, XXXXXXX
|
||||
),
|
||||
|
||||
|
||||
/* Numpad
|
||||
*
|
||||
* ,--------------------------------------------------.
|
||||
* | | | | | | / | |
|
||||
* |------+------+------+------+------+------+--------|
|
||||
* | | | 7 | 8 | 9 | * | |
|
||||
* | |------+------+------+------+------+--------|
|
||||
* |------| | 4 | 5 | 6 | - | Enter |
|
||||
* | |------+------+------+------+------+--------|
|
||||
* | | | 1 | 2 | 3 | + | Enter |
|
||||
* `-------------+------+------+------+------+--------'
|
||||
* | | 0 | . | Calc | Calc |
|
||||
* `----------------------------------'
|
||||
*/
|
||||
|
||||
// [] = LAYOUT_ergodox(
|
||||
// // -----------------------------------------------------left hand-----------------------------------------------------
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______,
|
||||
|
||||
// _______, _______,
|
||||
// _______,
|
||||
// _______, _______, _______,
|
||||
|
||||
// // -----------------------------------------------------right hand-----------------------------------------------------
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______, _______, _______,
|
||||
// _______, _______, _______, _______, _______,
|
||||
|
||||
// _______, _______,
|
||||
// _______,
|
||||
// _______, _______, _______
|
||||
// ),
|
||||
|
||||
};
|
||||
|
||||
bool process_record_keymap(uint16_t keycode, keyrecord_t *record) {
|
||||
switch (keycode) {
|
||||
|
||||
}
|
||||
return true;
|
||||
}
|
||||
29
keyboards/ergodox_ez/keymaps/nathanvercaemert/config.h
Normal file
29
keyboards/ergodox_ez/keymaps/nathanvercaemert/config.h
Normal file
@@ -0,0 +1,29 @@
|
||||
/*
|
||||
Set any config.h overrides for your specific keymap here.
|
||||
See config.h options at https://docs.qmk.fm/#/config_options?id=the-configh-file
|
||||
*/
|
||||
#define ORYX_CONFIGURATOR
|
||||
#undef TAPPING_TERM
|
||||
#define TAPPING_TERM 175
|
||||
|
||||
#undef MOUSEKEY_DELAY
|
||||
#define MOUSEKEY_DELAY 20
|
||||
|
||||
#undef MOUSEKEY_MAX_SPEED
|
||||
#define MOUSEKEY_MAX_SPEED 14
|
||||
|
||||
#undef MOUSEKEY_TIME_TO_MAX
|
||||
#define MOUSEKEY_TIME_TO_MAX 30
|
||||
|
||||
#undef MOUSEKEY_WHEEL_INTERVAL
|
||||
#define MOUSEKEY_WHEEL_INTERVAL 50
|
||||
|
||||
// /* Temporarily defining a tapping term that is ridiculous to see if i can tell if lt is working. */
|
||||
// #undef TAPPING_TERM
|
||||
// #define TAPPING_TERM 499
|
||||
|
||||
/* Turning permissive hold and ignore mod tap interrupt off in order to test the tapping term. */
|
||||
#undef PERMISSIVE_HOLD
|
||||
#define PERMISSIVE_HOLD
|
||||
#undef IGNORE_MOD_TAP_INTERRUPT
|
||||
#define IGNORE_MOD_TAP_INTERRUPT
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user